
6月1日, 举办第二届校企合作毕业设计项目展。上海交通大学副校长奚立峰、机械与动力工程学院党委书记兼院长杜朝辉等,毕业设计项目指导教师、美国宾州州立大学教授代表,以及来自上汽大众、克恩里伯斯、富世华等资助企业的80余名企业嘉宾参加了此次活动。


奚立峰表示,第二届校企合作毕业设计是对去年毕业设计创新模式的延续,对培养学生创新与实践能力具有重要意义。他对本次毕设展导师及学生的工作成果表示嘉许、对企业的大力资助表达感谢,并期望校企合作毕业设计项目能再接再厉、再创佳绩。杜朝辉在致辞中指出,经济社会发展对新时代的教学与人才培养提出了新要求,校企联合毕业设计作为校企合作的新模式,有利于培养学生的团队精神和领导能力,为学生创建一个更好的创新实践平台,同时校企联合毕业设计也是响应国家级教学教育试验理念,开展新工科创新的重要实践。他对企业伙伴给予学生共同协作的机会表示感谢,并对毕业生提出期望。


克恩-里伯斯的首席执行官张臻伟作为嘉宾代表从企业的角度表达了对校企合作毕业设计新模式的看法。毕业设计课程总负责教师陈璐具体介绍了学院推行的毕设改革创新模式,展示了本届毕业设计的企业资助、学生完成情况及取得的成果等内容,并介绍了下一届毕业设计初步规划。

此次校企合作毕业设计项目展共展出了423名学生历时6个月完成的128个企业项目,这些项目分别来自于上汽大众、上海电气、泛亚汽车、Kern-liebers、Husqvarna、Johnson Controls、Timken等国际知名企业。每个项目由3-4名上海交大学生合作完成,其中11个国际毕设项目分别与美国宾州州立大学、加拿大多伦多大学学生合作完成。
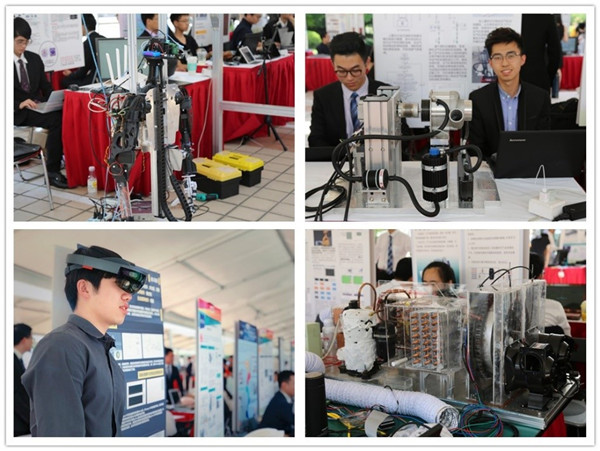
发散的思维、工程学机理的应用、优化的设计方案、精心制作的仿真模型……一件件设计作品展现了学生的奇思妙想和扎实的工程实践能力,为前来参展的企业嘉宾和校内外师生提供了一场创意盛宴。毕业设计项目展现场,参展学生向嘉宾介绍各自项目的设计理念、思路等,校企嘉宾与学生展开积极的互动交流,并提出更优化的建议。活动正值六一儿童节,现场吸引了不少小学生前来观展,他们好奇提问,聚精会神地听项目组成员讲解,在成长中体验科技。
经过指导老师和企业嘉宾的共同评审,项目展最终评选出“优秀设计”一等奖3项、二等奖3项、三等奖4项,优胜奖6项,最佳展示奖10项。颁奖典礼上,学院副院长王丽伟对提供支持的企业表示感谢,认为校企合作的模式不仅提升了学生团队合作能力,更是通过企业具有前沿性的特点为学生提供了更高更开阔的平台,她对即将毕业的2014级学子表达了美好祝愿。

作为教育部首批试点学院,机械与动力工程学院以培养具有国际视野的创新型工科人才为目标。近年来,学院依托产学合作平台,借鉴全球化企业团队合作模式,开展项目式教学、课程项目展教学改革,连续举办八届课程项目成果展,取得明显成效。自2017届毕业生起,学院将设计与制造系列课程进一步推广到毕业设计,对毕业设计(论文)进行试点改革,围绕本科毕业设计的要求,在课程中解决工业企业及生活中面临的实际工程问题。
2018年延续去年的成功经验,继续开展第二届校企合作毕业设计。毕业设计过程中,企业根据自身需求提出设计项目并提供支持,学生以2-4人组成项目团队,在企业导师与校内导师的共同指导下协作完成。这种毕业设计组织方式,不仅锻炼了学生系统解决复杂工程问题的能力,激发其创新思维,提升团队合作意识及交流沟通能力,还融入了企业实际需求,进一步推进了产学合作,成为培养符合现代工程需求的复合型工科创新人才的有益尝试,也为“工业4.0”时代培养具有国际竞争力的创新人才积累了经验。
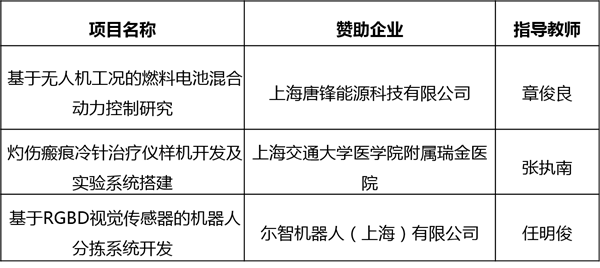
获奖清单:
一等奖

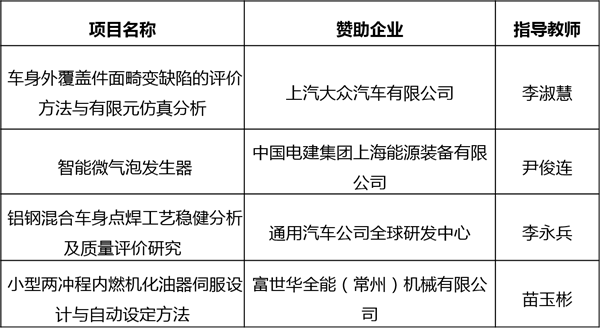
二等奖
三等奖
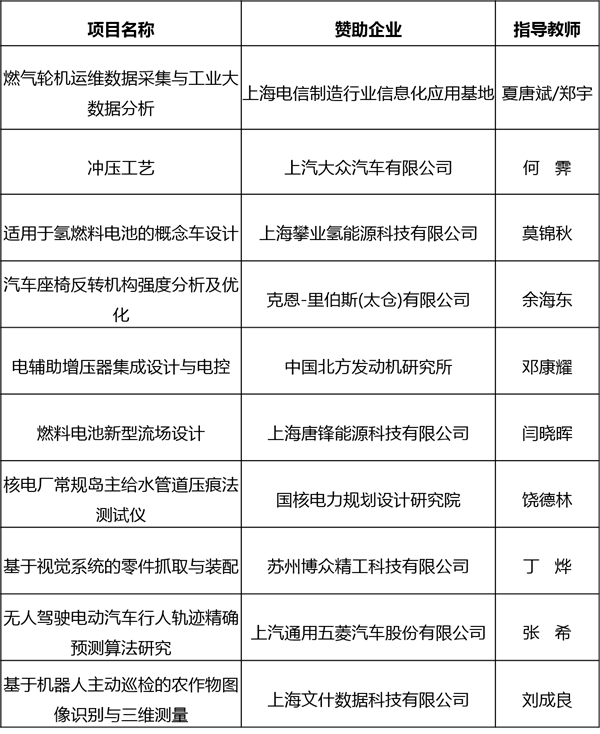
优胜奖

最佳展示奖
校企合作毕业设计项目展一等奖作品简介
项目名称:工业机械臂力控装配系统设计
小组成员:李旺、黄晨宇、曹文博
指导老师:吴建华
项目简介:

随着工业4.0的推进,机器人装配作业成为机器人发展的关注焦点。项目结合苏州博众公司要求,利用MATLAB和Adams搭建了力控联合仿真平台,用于装配、打磨等作业的仿真,减少力控算法调试的风险与时间;采用自适应导纳控制算法与避免装配卡阻、楔紧装配策略,完成了机器人轴孔装配仿真,并对轴孔装配过程中机器人运动学、提高机器人绝对定位精度、减小碰撞力等实际工程问题做了研究,实现了预期任务目标。
项目名称:可穿戴下肢运动机能监测与智能云评价系统
小组成员:蒋宇捷、胡益恺、何国晗、褚健、李全宸
指导老师:曹其新
项目简介:
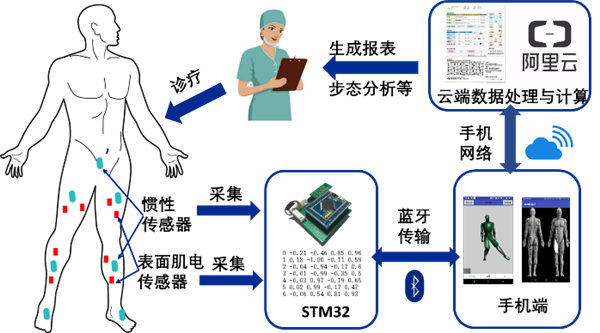
目前国内市场对运动康复的需求同康复资源之间的矛盾日益突出,主要集中于患者对医院高端仪器设备以及高端康复师的依赖,传统康复学科亟需向数字化、智能化和远程化转型。项目采用SENSOR+IOT+AI技术,利用传感器获取人体惯性参数与肌电信息,通过下肢四元数运动学建模实现人体姿态还原,结合人体关节参数自辨识与广义互补滤波算法实现误差矫正与标定,并搭建以LSTM神经网络为基础的评价系统,利用手机端作为交互界面,同时建立云端管理与评价界面,实现一键生成步态分析报告,辅助医生进行远程诊断。
项目名称:失效法兰自动检测与分选
小组成员:魏源、居易、沈晓晔、荆梦杰、葛建文
指导老师:贡亮
项目简介:
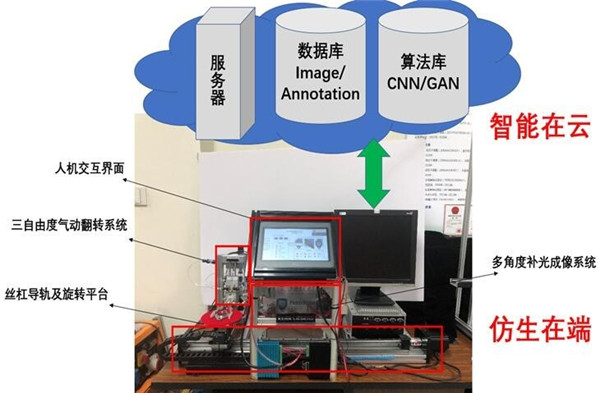
针对空间复杂型面上微细瑕疵检测难题,项目提出了“传感-操作-决策一体化协同仿生”检测法,从方面视角选择、观测方法、识别经验3方面模拟熟练产业工人行为,开发眼手协同自动化系统,实现高效法兰表面微细瑕疵检测与分类溯源。项目对接赞助企业日产50万件法兰制造生产线,设计了自动上下料、调姿、成像的法兰表面质量检测专机,部署了嵌入式实时算法,开发了人机友好操作界面,建立了法兰表面瑕疵检测本地数据库和算法库、云端接入接口,进行智能化检测与自动化分类,为工件非平面表面检测难题提供了通用解决方法。
供稿:本科生教务办
Copyright ©2019.
学生工作办公室版权所有
地址:上海市东川路800号上海交通大学闵行校区机械与动力工程学院




