
日期:2018-12-20 供稿:机器人研究所
12月20日,国际著名学术期刊《科学•机器人学》(Science Robotics)在线发表了“软体爬壁机器人”(Soft wall-climbing robots)研究论文,这是我校首次在《Science Robotics》上发表论文。该论文由机械与动力工程学院机器人研究所与麻省理工学院活性软体材料实验室合作完成,上海交通大学为第一单位,谷国迎教授和博士研究生邹江为论文共同第一作者,朱向阳教授、赵选贺教授和谷国迎教授为论文的共同通讯作者。

软体机器人主要由智能软材料驱动的人工肌肉组成,具备结构-驱动一体化特点,在接触外部环境时能产生主动的身体变形,具有极高的柔顺性。近年来,各类新型的软体机器人原型系统(例如软体抓手、软体爬行机器人、软体伪装机器人、软体生长机器人和软体机械鱼等)相继在国内外实验室出现,作为一项多学科交叉的前沿技术,软体机器人大幅拉近了机器与生命体之间的距离,体现了机器人技术的未来发展趋势。
上海交通大学朱向阳、谷国迎团队与麻省理工学院赵选贺团队合作,研制了首个由介电弹性体人工肌肉和静电吸附脚掌构成的软体爬壁机器人(自重2g,身长85mm),其中介电弹性体人工肌肉用于驱动机器人本体的快速周期运动,静电吸附脚掌用于产生时间和空间可控的静电吸附力,机器人的稳定快速爬壁运动由介电弹性体人工肌肉和静电吸附脚掌的协同控制来实现。
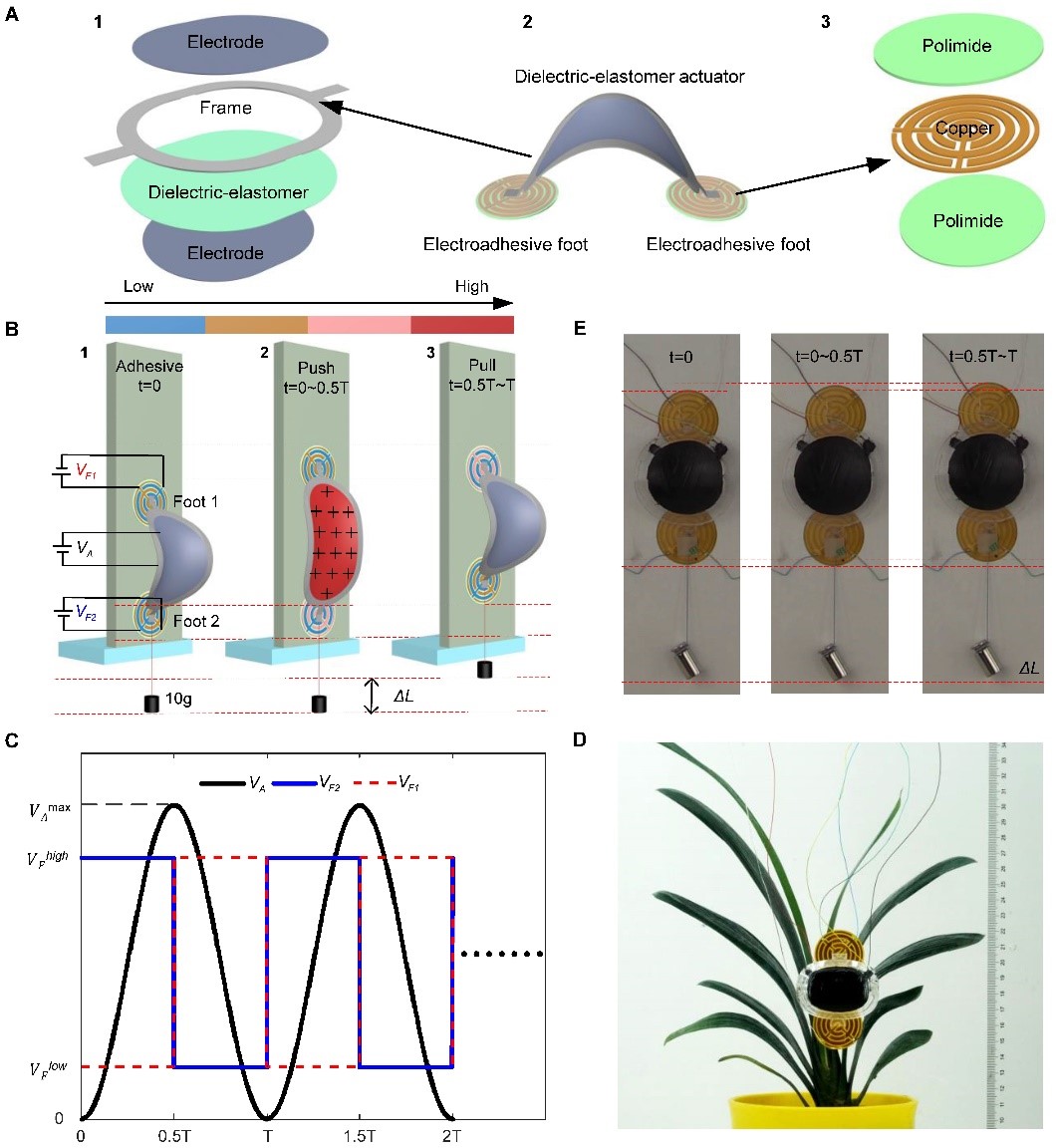
软体爬壁机器人的设计和工作原理:(A)结构设计;(B)爬壁原理;(C)协同控制策略;(D)玻璃爬壁实验示意;(E)带10g负载爬壁实验示意。
实验结果显示,该软体机器人具有与生物体类似的垂直爬壁、水平爬行、原地转弯能力和敏捷的环境适应运动能力,在竖直狭小空间中的探测、搜救和墙面清理方面展现了潜在应用前景。


该研究工作得到了国家优秀青年基金项目、国家自然科学基金委共融机器人重大研究计划重点项目和上海市科委“科技创新行动计划”基础研究项目的资助。
论文链接:http://robotics.sciencemag.org/content/3/25/eaat2874?from=timeline


Email:sjtume@sjtu.edu.cn
地址:上海市东川路800号上海交通大学闵行校区机械与动力工程学院
邮编:200240
Copyright © 2019 版权所有