题 目:The Development of a Fast Pick-and-Place Robot with an Innovative Cylindrical Drive
时 间: 2018年10月15日 14:00 - 16:00
地 点: 机械与动力工程学院 振华会议室
邀请人 : 王 皓 教授、 陈根良 副教授(汽车工程研究院)
报告人简介:

Professor Jorge Angeles received his PhD from Stanford University in 1973 and has been on the faculty of McGill University since 1984, where now he is James McGill Professor Emeritus of Mechanical Engineering and member of the Centre for Intelligent Machines. He has authored or co-authored various books in the areas of kinematics and dynamics of mechanical systems, as well as numerous technical papers on the subject. His research interests focus on the theoretical and computational aspects of multibody mechanical systems for purposes of design and control. Professor Angeles is also a consultant to various Canadian and international organizations in the areas of automation, mechanical design, and robotics. Fellows of: ASME; IEEE; the Canadian Society of Mechanical Engineering; the Canadian Academy of Engineering; the Royal Society of Canada; Past President of IFToMM and one of IFToMM’s 12 Honorary Members. Angeles has held visiting positions at various European universities, Nanyang Professorship at Nanyang Technological University of Singapore, Velux Professorship at Aalborg University, Denmark, and Honorary Professor at Tianjin University, China.
报告简介:
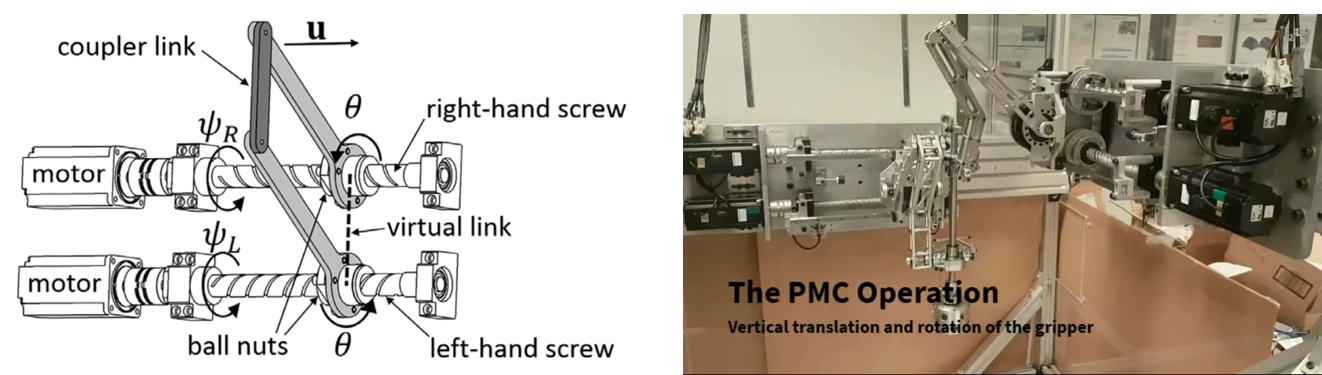
Packaging and assembly operations are calling for ever faster means of delivering low-cost, high-quality products, which has motivated the development of fast pick-and-place robots. The tasks at hand usually comprise motions involving the subgroup of Schoenflies displacements. This is characterized by three translations and one rotation about an axis of fixed orientation. The main challenge these systems pose to their designers is the 180-deg turn of their moving platform. Commercial robots of this kind are supplied with ingenious mechanisms to produce this rotation, but the mechanism adds a substantial complexity to the overall system. As an alternative, a family of simple, isostatic architectures was proposed recently by researchers. These architectures include two limbs, each carrying a cylindrical shoulder, which is actuated by, and ending up by screw nuts coupled to each forearm by means of a universal joint. A vertical rod carries two screws of distinct pitches in series, the gripper at the lower end, playing the role of the moving platform of parallel robots. The rod is displaced with four degrees of freedom in a similar fashion to the long peppermill seen in Italian restaurants, with the two screw nuts playing the role of the waiter‘s hands. Moreover, each shoulder is driven by one collar that undergoes cylindrical motion (rotation about an axis and translation along a direction parallel to the axis), the challenge here being the design of the drive that can provide the 2-DOF of a cylindrical motion. Such a mechanism, dubbed the C-drive and developed at McGill University, is actuated by two identical motors that are fixed to the base, and carries a closed kinematic chain that was synthesized by means of an application of the theory of displacement subgroups, which is currently developed at McGill University, with one C-drive per arm. The operation principles of the robot and its main components are highlighted in this presentation.