
6月18日,上海交通大学2022届优异学士学位论文(TOP1%)正式揭晓,机械与动力工程学院龚超越、杨之远、尹昊、毛雨轩4位学子获评。
|
姓名 |
指导教师 |
获奖论文 |
|
龚超越 |
尹俊连 |
微气泡可视化测量与三维形貌重建的方法研究 |
|
杨之远 |
盛鑫军 |
介入器械操控机器人机构设计与开发 |
|
尹昊 |
朱翀 |
基于 RC 热阻网络的电动汽车车载充电模块温升模型构建 |
|
毛雨轩 |
陈晓军 |
PET/CT 用人体呼吸运动信息分析系统研发 |
为进一步推进校企产学结合的工程教育模式改革,学院自2017届起对毕业设计(论文)进行试点改革,改革后的本科毕业设计以项目的形式组织实施,围绕本科毕业设计要求,紧密结合企业实际研发需求,协作解决来自企业的实际应用问题。2022届本科生毕业设计(论文)评选活动中,学院推荐了5位学子参选,学校从论文的难度、工作量、研究过程、研究结果以及答辩表现各方面综合考察学生素质, 最终4位学子获此荣誉。
附:优异学士学位论文简介
学生姓名:龚超越
指导教师:尹俊连
论文题目:微气泡可视化测量与三维形貌重建的方法研究
论文简介:
对于泡状流的研究依赖于对实验气泡信息的提取与分析,目前常用方法是使用高速摄像机与图像处理相结合的方式对微气泡信息进行提取,然而该方法往往依赖于气泡图像的剪影而抛弃了图像中丰富的灰度信息。论文提出了一种使用单相机图像中的灰度信息并重建为气泡单侧形状的方法,获得了复杂气泡界面的三维形态,与二维的表征方法相比,测量精度提高了一个等级。
学生姓名:杨之远
指导教师:盛鑫军
论文题目:介入器械操控机器人机构设计与开发
论文简介:
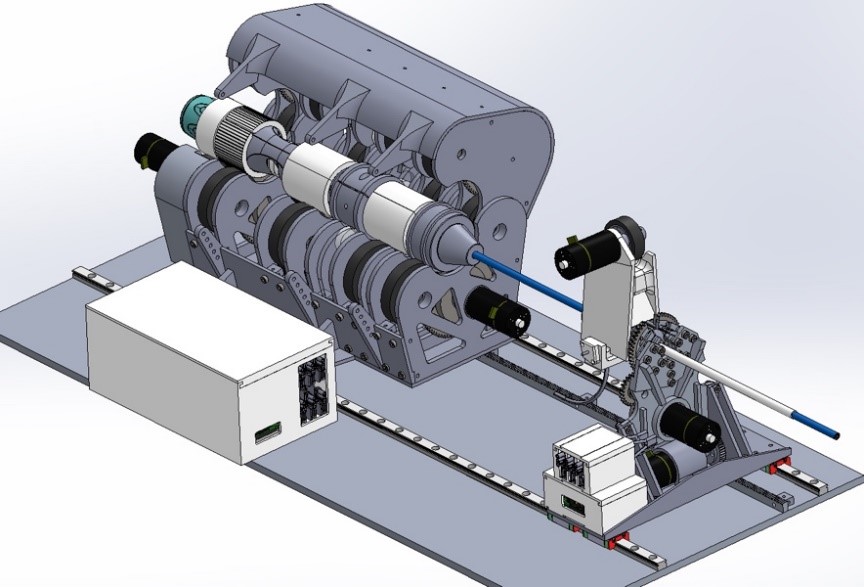
摩擦轮控制方案总装图
论文主要研究用于控制器械前端的介入器械操控机构,并提出两种核心思路对原系统进行控制,分别是基于摩擦轮驱动的可拆卸介入器械操控装置,以及基于活动槽口的分体式介入器械操控装置。论文提供了非定位的摩擦轮操控装置与定位的活动槽口分体式操控装置两种创新方案,均为心脏介入器械自动输送系统操控装置提供了一种可行的机构原型。
学生姓名:尹昊
指导教师:朱翀
论文题目:基于RC热阻网络的电动汽车车载充电模块温升模型构建
论文简介:
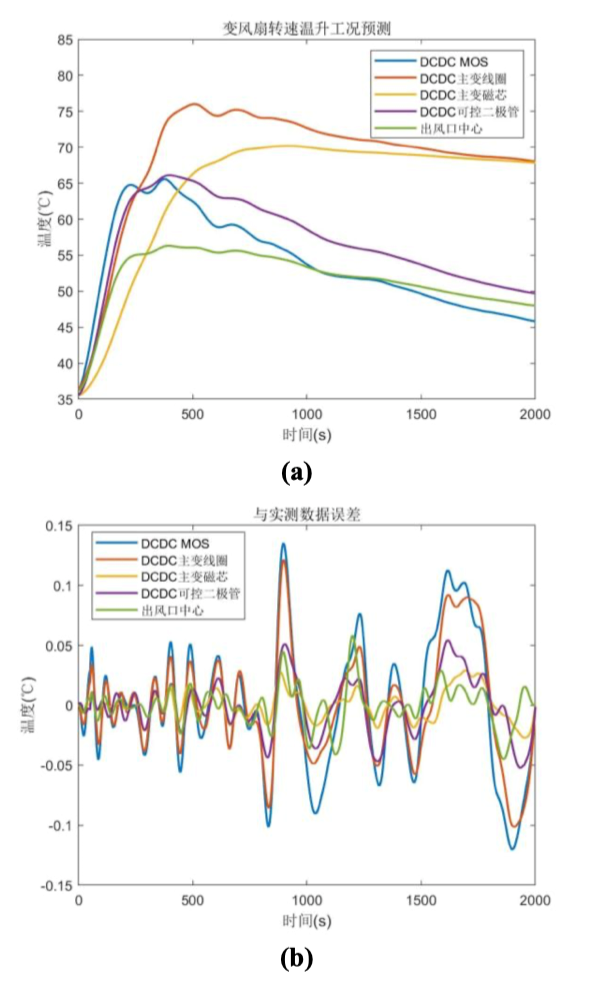
包含耦合非线性函数库的温升重构 (a)重构曲线 (b)与实验数据误差
为了较为精确地预测充电模块各工况下的温度分布,建立风扇转速控制对器件温度分布的影响关系,论文围绕热阻网络模型建立以及热网络参数辨识展开了研究,基于传热学原理推导出节点间的热传导关系,建立了节点间的 RC 热网络模型。论文将各种新型数据驱动方法引入复杂系统的热网络辨识中,避免了传统热模型建立中复杂的计算推导和仿真模拟,可达到更好的精度,有助于风扇转速的合理控制,降低噪声、延长使用寿命。
学生姓名:毛雨轩
指导教师:陈晓军
论文题目:PET/CT 用人体呼吸运动信息分析系统研发
论文简介:
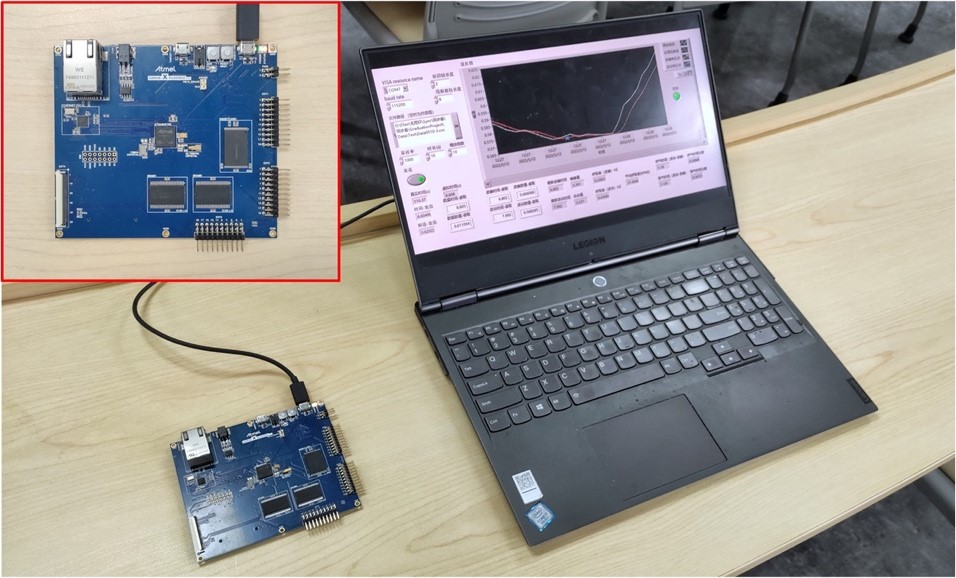
整体系统实验的设备和场景
在临床诊断或治疗中,患者的呼吸运动会引入位置误差,为胸腹部疾病的诊断和治疗带来较大难度。论文从理论上提出了一种基于时域信号的呼吸运动信息分析模型,设计了一系列从复杂原始信号中提取呼吸状态、呼吸波形、呼吸时相和呼吸功能参数信息的方法,并结合实际 PET/CT 设备扫描时的应用场景,搭建了一套低延时、低成本、在线处理、与 PET/CT 流程兼容的呼吸信息分析系统,包括基于小型嵌入式设备的下位机程序和基于 LabVIEW 的上位机软件环境。
