
5月29日至6月3日,2017年机器人与自动化国际大会(ICRA 2017)在新加坡举行,我院高峰教授团队研制的两款新型六足步行机器人亮相大会并引起广泛关注。高峰应邀作了题为“Design and application of Parallel-Parallel 6-legged Robots”的大会报告。

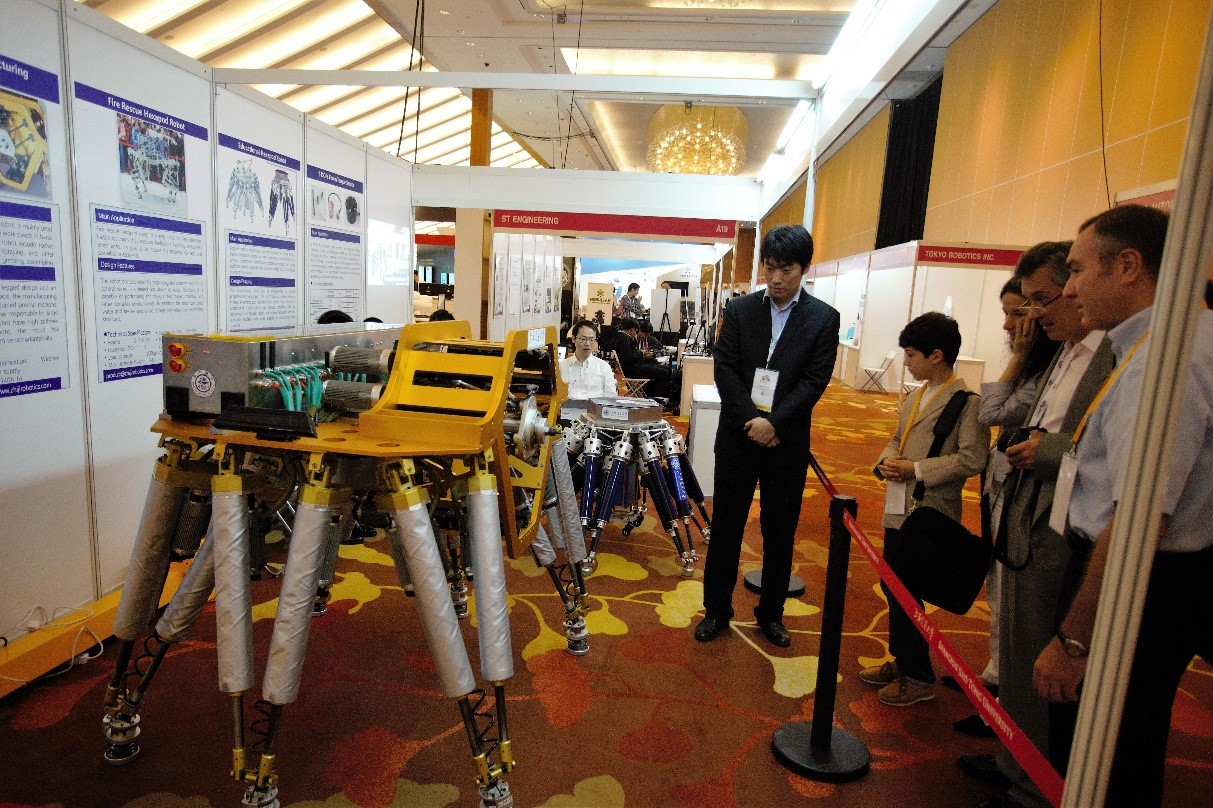
此次参展的两款腿式步行机器人结构新颖,瞄准未来机器人教育和智能制造领域。教育机器人趣味性强,适合高等院校在机器人教学中使用,作为复杂路面行走、自主导航、人机交互等的智能控制平台;另外一款用于智能制造的新型六足机器人反映了移动制造思想,适用于大型/超大型特殊工件的移动加工作业。两款机器人的现场演示受到了众多相关领域专家学者的关注以及多家新闻媒体报道,Science杂志Robotics子刊在其官方推特上对这两款机器人也作了特别推荐。

ICRA(International Conference on Robotics and Automation)是IEEE旗舰会议,是机器人研究领域最前沿的国际交流平台,此次参会扩大了我院机器人研究的国际声誉。
