
News
News
Recently, Professor Weizhong Guo's team from the Institute of Advanced Equipment Design and Control Engineering at the School of Mechanical Engineering, Shanghai Jiao Tong University, published a research paper titled “Synthesis and Cross-Section Design of a New Family of Single-Loop 7R Deployable Polygon Mechanisms”in the international journal Mechanism and Machine Theory. The team is the first to propose single-loop 7R deployable polygon mechanisms and establish a systematic design method. This provides a feasible approach for designing large movable structures with general expanding profiles and mesh divisions, offering new technological pathways for complex deployable functions and spatial optimization in aerospace, mechanical metamaterials, and architectural design. Hao Chen, a doctoral student in the Zhiyuan Honors Program (class of 2022) at the Institute of Advanced Equipment Design and Control Engineering, is the first author of the paper, with Professor Weizhong Guo as the corresponding author.
Deployable polygon mechanisms (DGMs) are a critical form for the development of future space deployable systems. Their ability to fold into tight bundles and expand into planar polygonal shapes gives them significant application potential. The paper introduces, for the first time, the single-loop single-degree-of-freedom (DOF) 7R deployable polygon mechanism, breaking down the design problem into two sub-problems: schematic synthesis for obtaining theoretical mechanism solutions and cross-section design for obtaining physical structure solutions, thereby establishing a systematic design method.
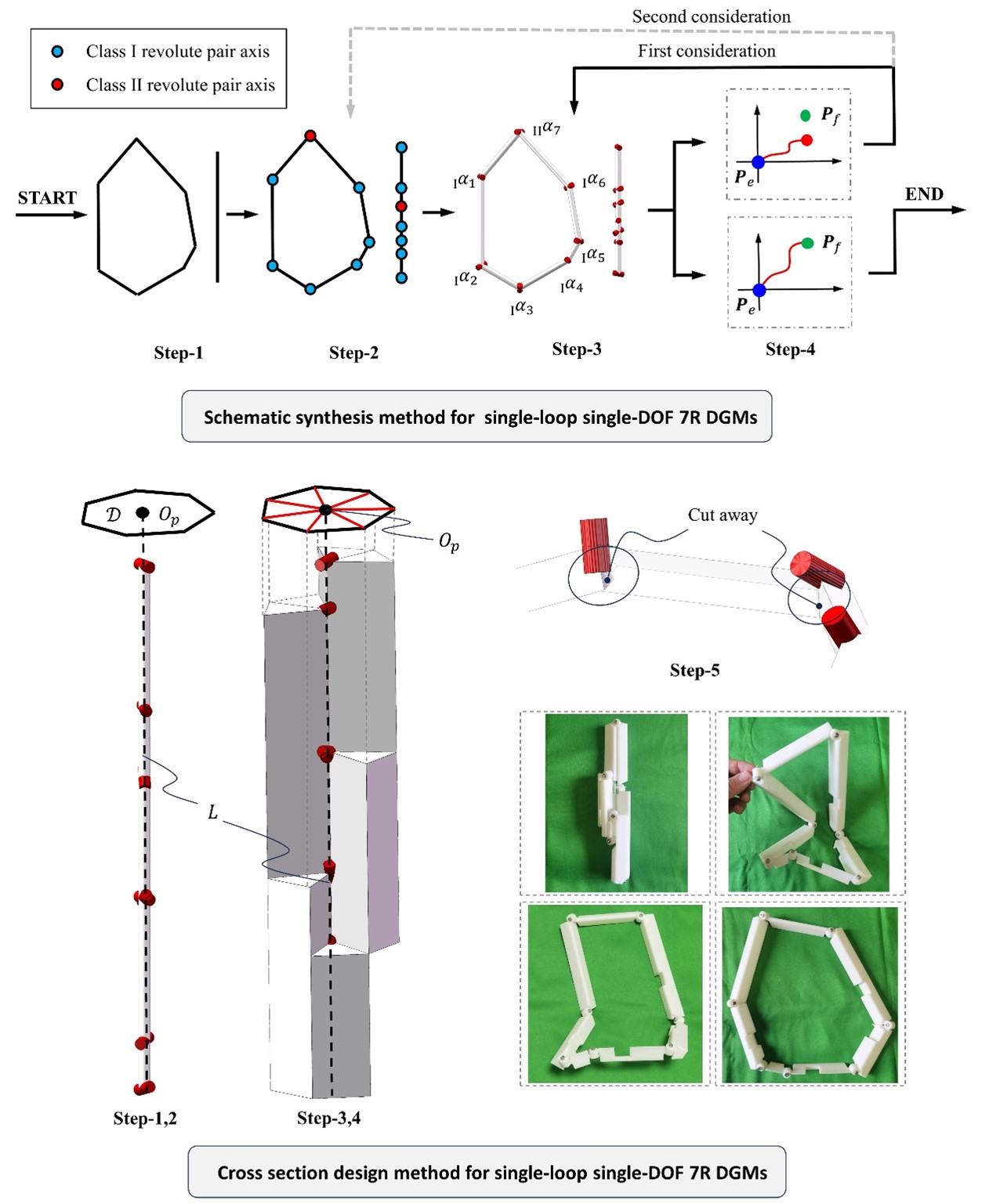
For the schematic synthesis to obtain theoretical mechanism solutions, the research team discussed the layouts and value ranges of two classes of revolute pair axes in the DGM construction process and defined three types of parameters necessary for building DGMs. To design a single-loop single-DOF DGM with any desired deployable polygon shape, the team pioneered the concept of using different states of the DGM to complete the design of different types of parameters. They provided all necessary constraints and their geometric meanings for each type of parameter design. Using a predictive-correction method, they solved the path search problem in the implicitly defined configuration space, forming a schematic synthesis method capable of designing all single-loop single-DOF 7R DGMs without over constraints. The idea of using different states of DGMs to complete the design of different types of parameters can be extended to the schematic design of other types of DGMs.
For the cross-section design to obtain physical structure solutions, the team proposed a new method considering the closed-loop constraints of the single-loop mechanism. This method accounts for the impact of the actual dimensions of each link on the foldability of the DGM, further refining the 7R DGM theoretical scheme at the physical structure level. This ensures that the designed 7R DGM device can achieve non-interfering bundle folding and expanding. Using this method, it is possible to design 7R DGMs with the required cross-sectional geometric shapes.
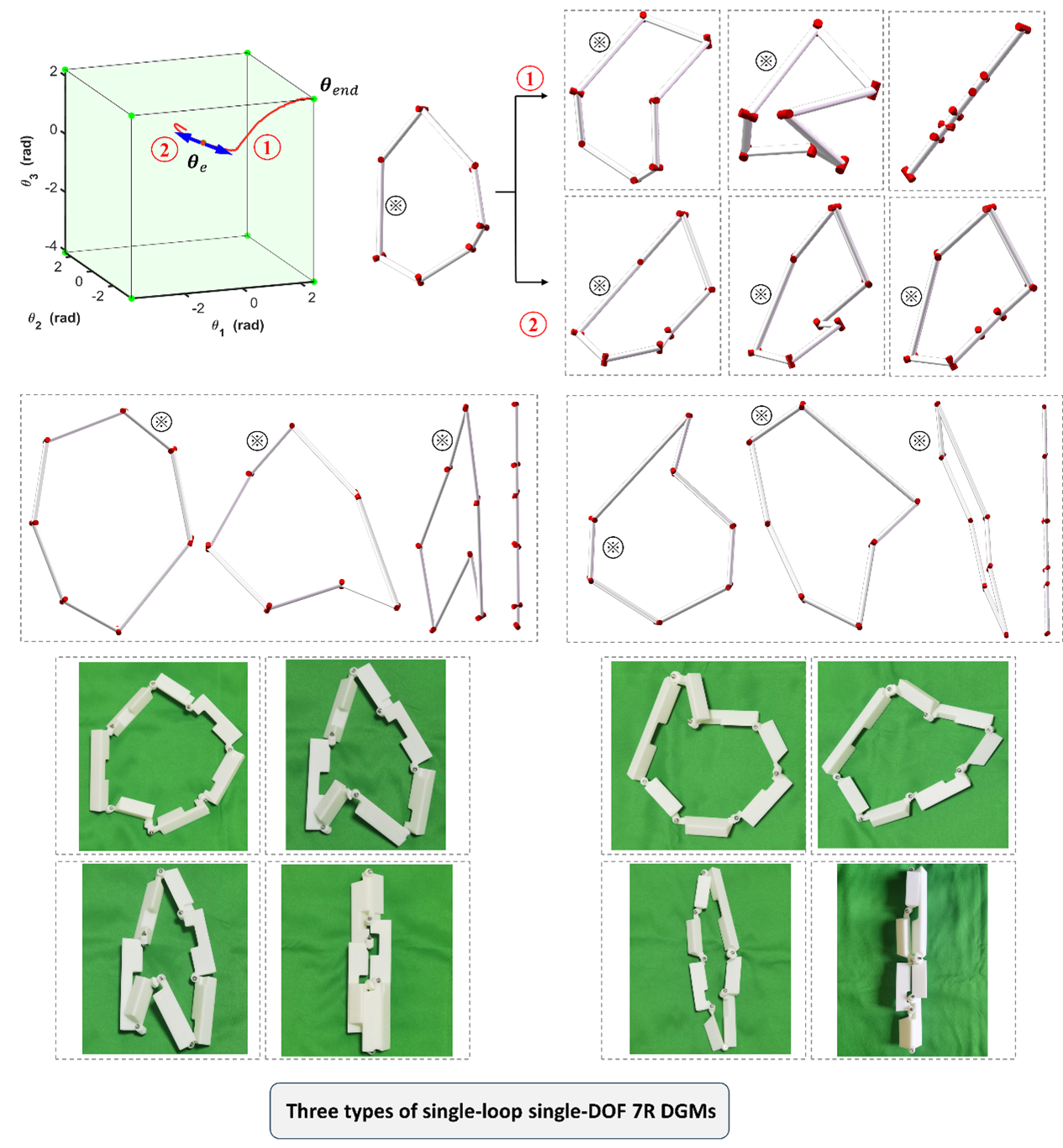
The paper introduces, for the first time, a new family of non-overconstrained 7R DGMs, filling a gap in the field of single-loop single-DOF non-overconstrained DGMs. The study systematically establishes a design method that effectively addresses the design issues of spatial deployable mechanisms with up to seven sides. This research outcome provides diverse fundamental units for constructing large-scale space deployable structures with any complex geometric shapes, significantly enriching the mesh division paths for such structures. It holds broad application prospects in aerospace, mechanical metamaterials, architectural design, and civil engineering.
The team has recently made a series of advancements in the field of deployable mechanisms. They have proposed synthesis methods for plane-symmetric 6R DGMs and general 7R DGMs, and invented a series of new deployable polygon/polyhedron mechanisms. For deployable polyhedron mechanisms (DPMs), the team introduced a new RRR chain to link the deployable units and established the polyhedron net method and the least joint angle method, which enable the design of DPMs with the fewest joints, links, and degrees of freedom.
Mechanism and Machine Theory, founded in 1970, is the official journal of the International Federation for the Promotion of Mechanism and Machine Science (IFToMM). It focuses on publishing high-quality research papers in the field of mechanism and machine science and enjoys a prestigious reputation in the international community.
Professor Weizhong Guo's team is dedicated to solving fundamental scientific problems and key technologies in modern kinematics and parallel robotics. Their goal is to drive innovation in major engineering applications such as aerospace through breakthroughs in fundamental theory. In recent years, the team has published over 30 papers in journals such as Mechanism and Machine Theory, ASME Journal of Mechanisms and Robotics, ASME Journal of Mechanical Design, and IEEE Transactions on Robotics.
Paper link: https://www.sciencedirect.com/science/article/pii/S0094114X24000806

Shanghai Jiao Tong University
Address: 800 Dongchuan Road, Shanghai
200240