

基于光场成像的内窥式三维流场测试技术研究
能源与动力工程资助企业: 奕目(上海)科技有限公司
企业导师: 李浩天

指导教师: 施圣贤
项目成员: 黄明睿、季文竹
 项目海报
项目海报

 项目视频
项目视频
 项目简介
项目简介
项目概述
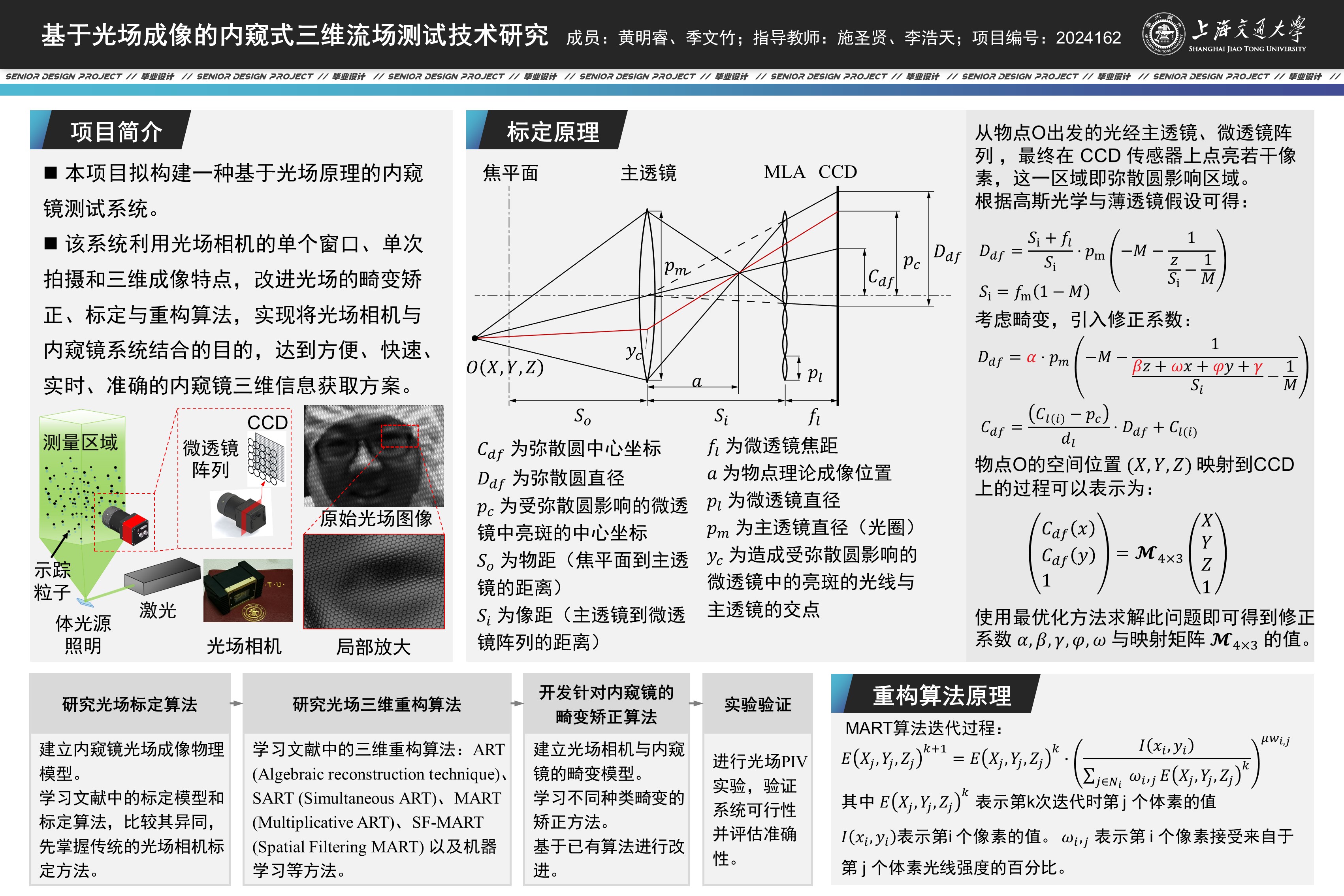
光场成像作为一种新型计算三维成像方式,其基于仿生复眼原理,可通过单次成像、单个光学孔径来捕捉三维信息。与传统相机不同,光场成相机通过放置在感光芯片前的一块高分辨率微透镜阵列来对入射光线进行调制和编码,使得相机可以在单张二维图像上记录下空间物体的三维信息。这一特点使得光场成像在一系列空间受限的测量领域优势明显。内窥镜作为一种在狭小区域内获取成像信息的方式,往往只能提供二维图像,难以提供观测物体的三维结构信息;或是采用双目成像方式来提供有限的三维成像结果。本项目通过将光场成像与内窥镜相结合,利用光场相机“单个窗口、单次拍摄、三维成像”的特点,来实现高分辨率的三维信息获取和解析。
项目目标
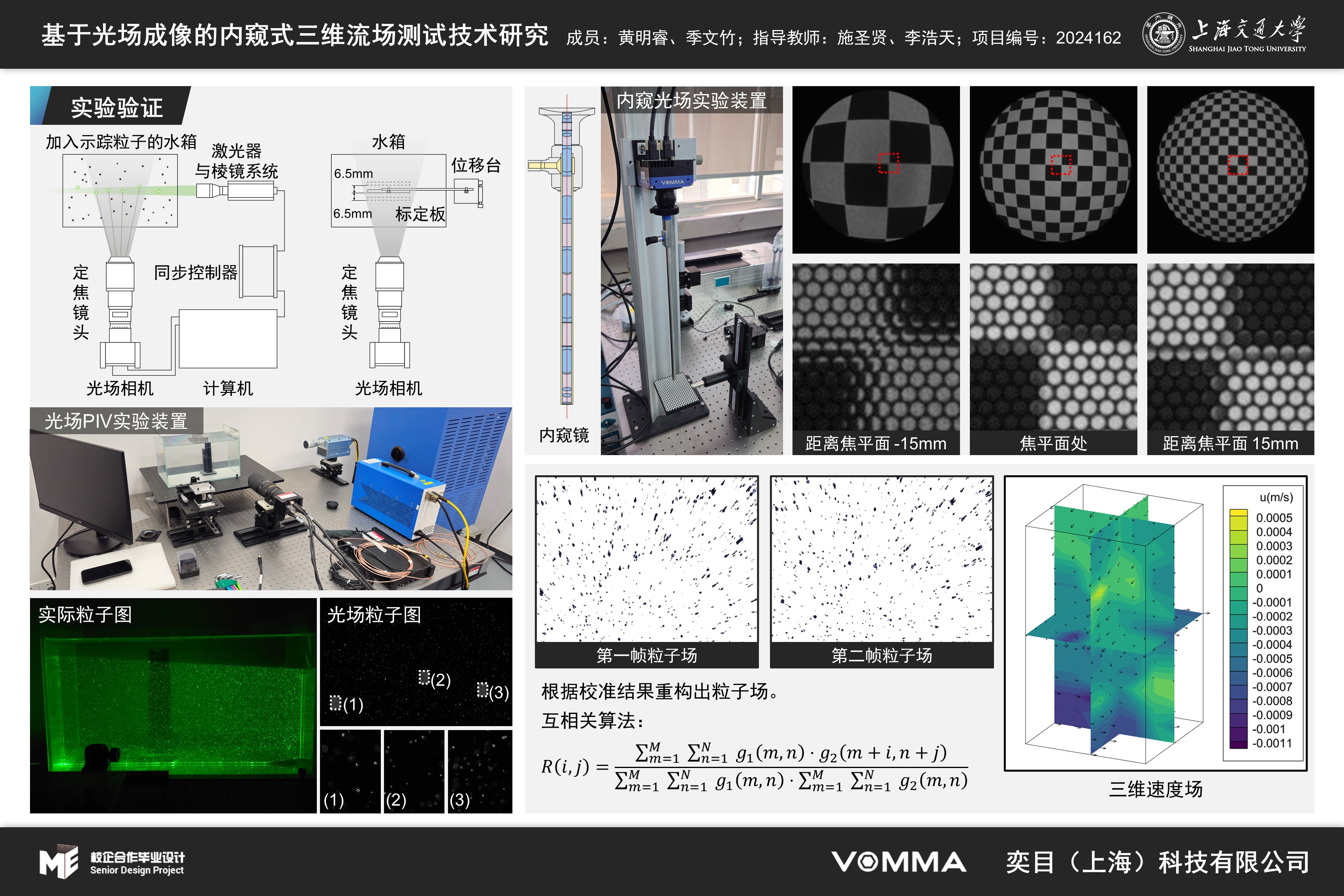
本项目旨在开发一套先进的内窥光场成像系统,以高分辨率光场相机和内窥镜为核心。项目首先基于现有硬件系统和高斯光学成像原理,深入研究和优化内窥光场的标定和三维重构算法。通过实验室现有光学测量设备,学习现有标定模型和内窥光场成像原理,搭建内窥光场成像系统并获取实验数据。进一步开发和调整图像处理算法,包括光场标定和三维重构用于处理和优化实验数据。最后,在实现以上算法的基础上,进行PIV实验,获取并计算光场成像三维信息。
项目成果
本项目基于细致的文献调研和需求分析,成功建立了一套内窥镜光场成像的物理模型,并搭建了完善的内窥光场成像系统。项目团队还开发了专用的光场标定算法和三维重构算法,通过实施相关的标定和重构实验,例如光场PIV实验,有效地获取了光场成像的三维信息。该成像系统的开发主要应用于空间受限的测量领域,可实现内窥镜三维信息的便捷、快速、实时和精确获取,极大提升了操作的效率和测量的精度。




