

机器人智能拆解工作站的数字孪生系统研究: 建模、交互与实现
能源与动力工程资助企业:
 上海觉云科技有限公司
上海觉云科技有限公司
企业导师: 常伟

指导教师: 陈铭
项目成员: 李靖灏 林正泽 沈裕焱
 项目海报
项目海报

 项目视频
项目简介
项目视频
项目简介
项目概述
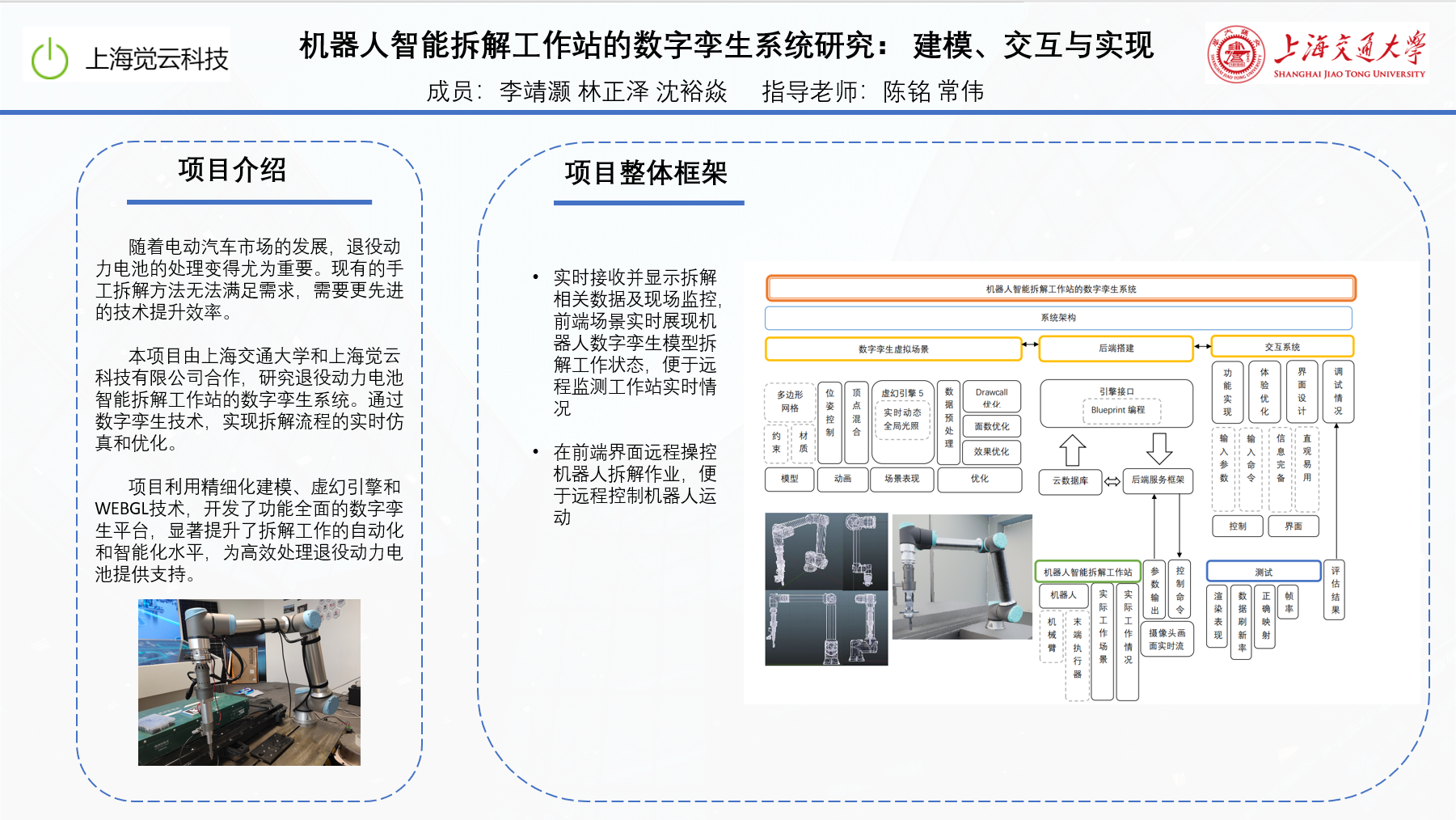
本项目名称为《退役动力电池机器人智能拆解工作站的数字孪生系统研究》,合作单位为上海交通大学和上海觉云科技有限公司。随着电动汽车市场的快速发展,妥善处理退役动力电池对生态环境保护和资源利用具有重要意义。项目通过数字孪生技术,在虚幻引擎(UE)和WEB前端中实现机器人拆解作业的实时仿真还原、实时显示拆解信息以及远程控制机器人,显著提升了拆解过程的效率和稳定性,支持新能源汽车产业的可持续发展。
项目目标
本项目旨在开发一套基于数字孪生技术的机器人智能拆解工作站,提升退役动力电池拆解的精细化和智能化水平。具体目标包括:构建高精度的数字孪生模型,增强拆解过程的真实感和准确性;利用虚幻引擎平台,开发多源数据融合与呈现技术,优化人机交互界面,实现实时仿真与远程控制;采用WEBGL技术与Vue3+TypeScript框架,构建功能全面、高度可定制的数字孪生平台,实现拆解位姿数据同步测试和前端双向孪生功能,提高操作灵活性和效率。
项目成果
本项目成功开发了基于数字孪生技术的机器人智能拆解工作站,取得了以下成果:构建了高精度的数字孪生模型,真实准确地展现了退役动力电池拆解的场景;开发了基于虚幻引擎的数字孪生系统,实现了多源数据融合、人机交互控制和实时仿真。构建了基于WEBGL技术的高度可定制数字孪生平台,集成了现代前端开发理念和模块化设计,有效优化了机器人运动控制和操作灵活性,显著提升了系统在不同应用场景下的适用性和灵活性。




