

大气驱动机械臂设计与功能验证
机械工程资助企业:
 上海伶机智能科技有限公司
上海伶机智能科技有限公司
企业导师: 张茂胜

指导教师: 杨斌堂
项目成员: 王滨雁 林郁欣 张荠文
 项目海报
项目海报

 项目视频
项目视频
 项目简介
项目简介
项目概述
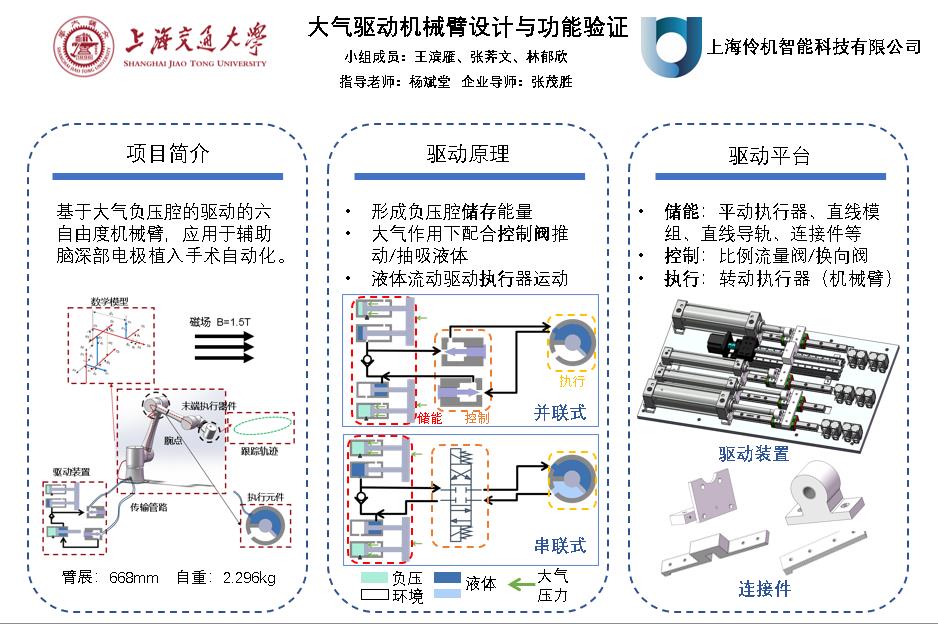
神经外科是一门高、精、尖学科,伴随着高质量的神经外科医疗服务需求的快速上升,用作手术辅助的精密机械臂成为热点。虽然机械传动的机械臂已经发展至成熟阶段,在精度、承载力方面有着突出的优势,但磁性金属材料的使用并不适用辅助如脑深部电极植入手术这类核磁环境下手术的全自动化。机械传动间隙产生碰撞和摩擦带来了作业过程中的振动、噪音及精度的限制。本项目的主要目标是设计和开发一款具备高精度、快响应、小尺寸、适应核磁环境工作等特点的脑深部电极植入手术辅助机械臂,创新设计基于大气负压腔的驱动系统,并对其进行功能验证。
项目目标
在(负压驱动关节)专利的基础上对大气/负压驱动方式进行分析与建模,创新设计基于该驱动方式的机械臂驱动关节,并搭建实验平台进行原理验证。
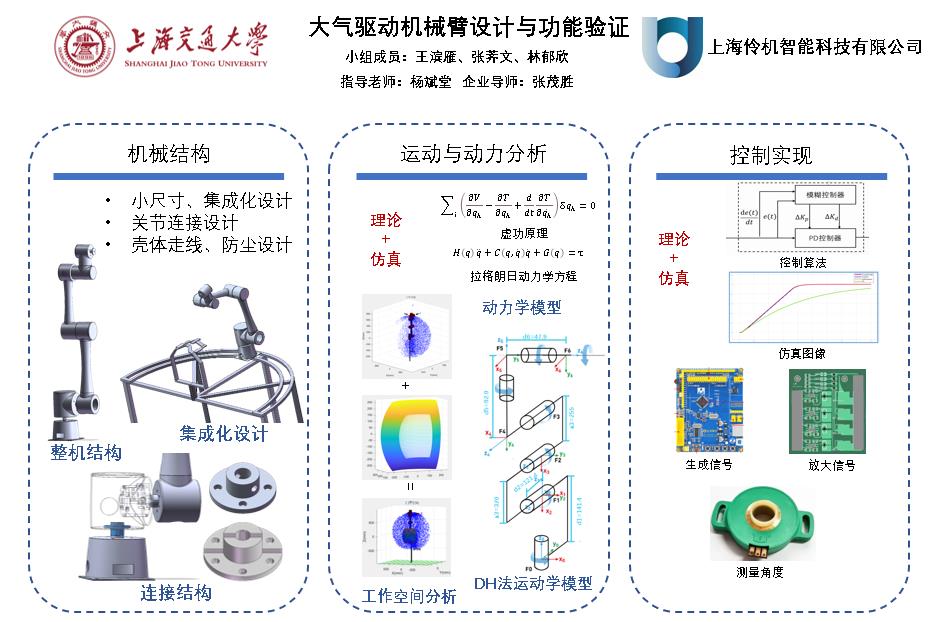
其次对机械臂结构进行设计建模,通过建立数学模型及仿真的方式对机械臂运动学动力学进行分析与验证,随后针对具体应用场景对目标工作空间及可达工作空间仿真分析。
最后在搭建样机的基础上对机械臂路径规划进行控制。
项目成果
建立了大气驱动的数学模型,基于数学模型的分析设计搭建了驱动装置,主要包括储能、控制、执行三个部分。在该装置上实现了“并联”、“串联”两种方式来利用储存的负压能量,以驱动转动执行元件运动,最终实现了六自由度转动执行元件的驱动。
根据工作空间分析、机械校核、动力分析等对机械臂尺寸、结构等进行多轮迭代优化,满足目标工作空间要求且实现小尺寸与集成设计,对于运动、动力学分别通过建立机械臂系统的数学模型及搭建仿真系统相互验证。
利用stm32单片机输出PWM信号分别控制12路阀门的通断情况,利用电位器式角度传感器测量阀门打开时摆动缸的角度变化,结合控制算法实现了单关节闭环控制,并比较不同输入PWM信号占空比下对应单关节转动速度的变化。在通断阀系统下利用控制输入信号的时长实现机械臂关节的正反向转动控制,通过改变角度的方式调整机械臂的位姿。




