

自动打磨机器人轨迹规划方法与系统设计
机械工程资助企业:
 上海智能制造功能平台有限公司
上海智能制造功能平台有限公司
企业导师: 丁浩伦

指导教师: 陶建峰
项目成员: 李健,陈睿,顾俊,肖子吟
 项目海报
项目海报

 项目视频
项目视频
 项目简介
项目简介
项目概述
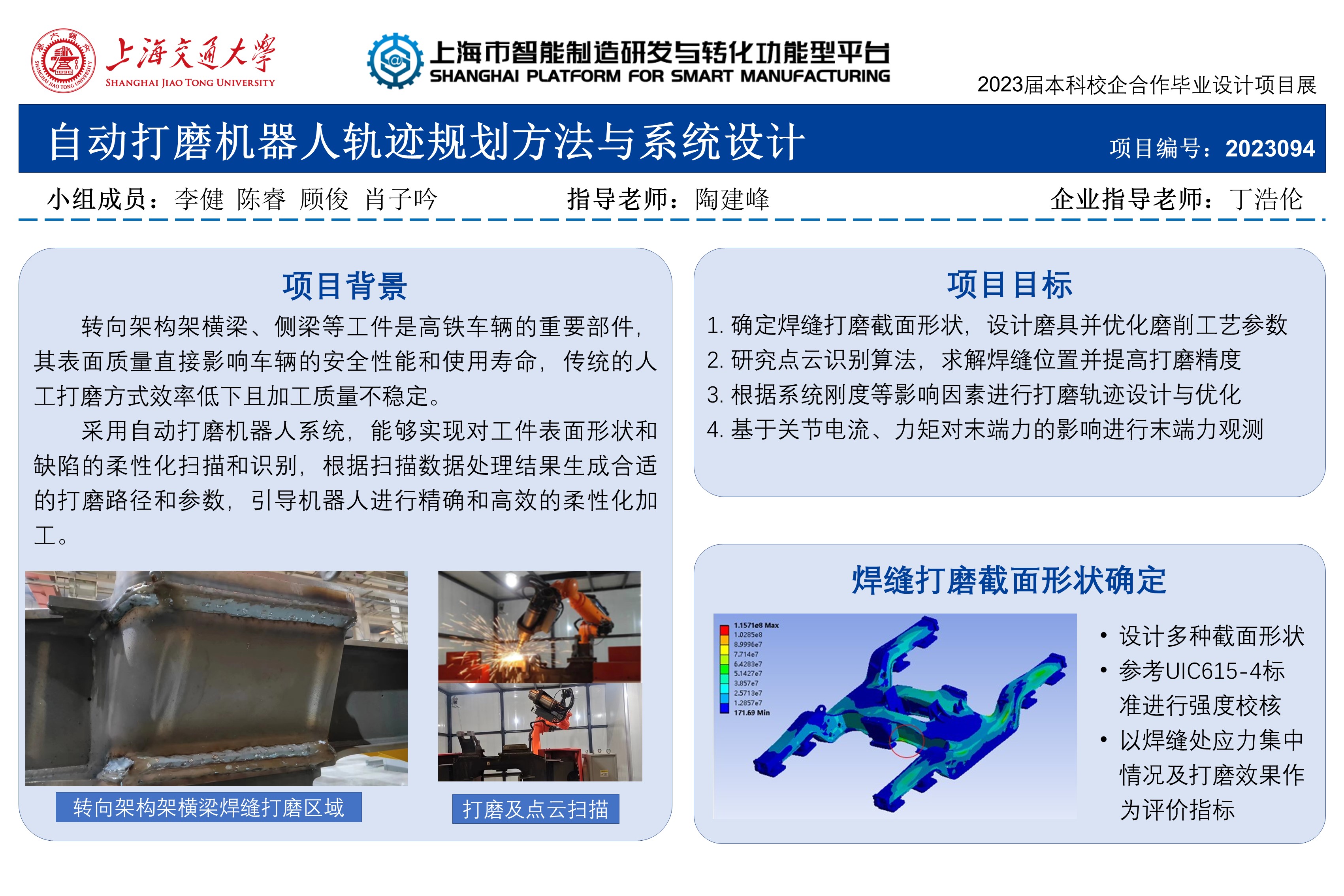
转向架构架横梁、侧梁等工件是高铁车辆的重要部件,其表面质量直接影响车辆的安全性能和使用寿命,传统的人工打磨方式效率低下且加工质量不稳定。因此,本项目采用自动打磨机器人系统,该系统由视觉传感器、打磨刀具和机器人本体组成,能够实现对工件表面形状和缺陷的柔性化扫描和识别,根据扫描数据处理结果生成合适的打磨路径和参数,引导机器人进行精确和高效的柔性化加工。
项目目标
本项目主要目标在于对机器人打磨焊缝过程进行优化,缩短加工节拍、提高打磨精度。项目主要分为以下四个部分展开。
1. 对不同打磨截面形状的焊缝开展应力分析,确定打磨截面形状,并基于此设计磨具,对磨削工艺参数进行优化。
2. 研究通过视觉识别将工件的位置信息化为点云图的算法,并能据此求得焊缝位置,优化识别算法提高打磨精度。
3. 全面分析系统振动、刚度、负载重力等影响因素进行打磨轨迹设计与优化。
4. 基于研究关节电机电流、力矩对末端力的影响进行末端力观测。
项目成果
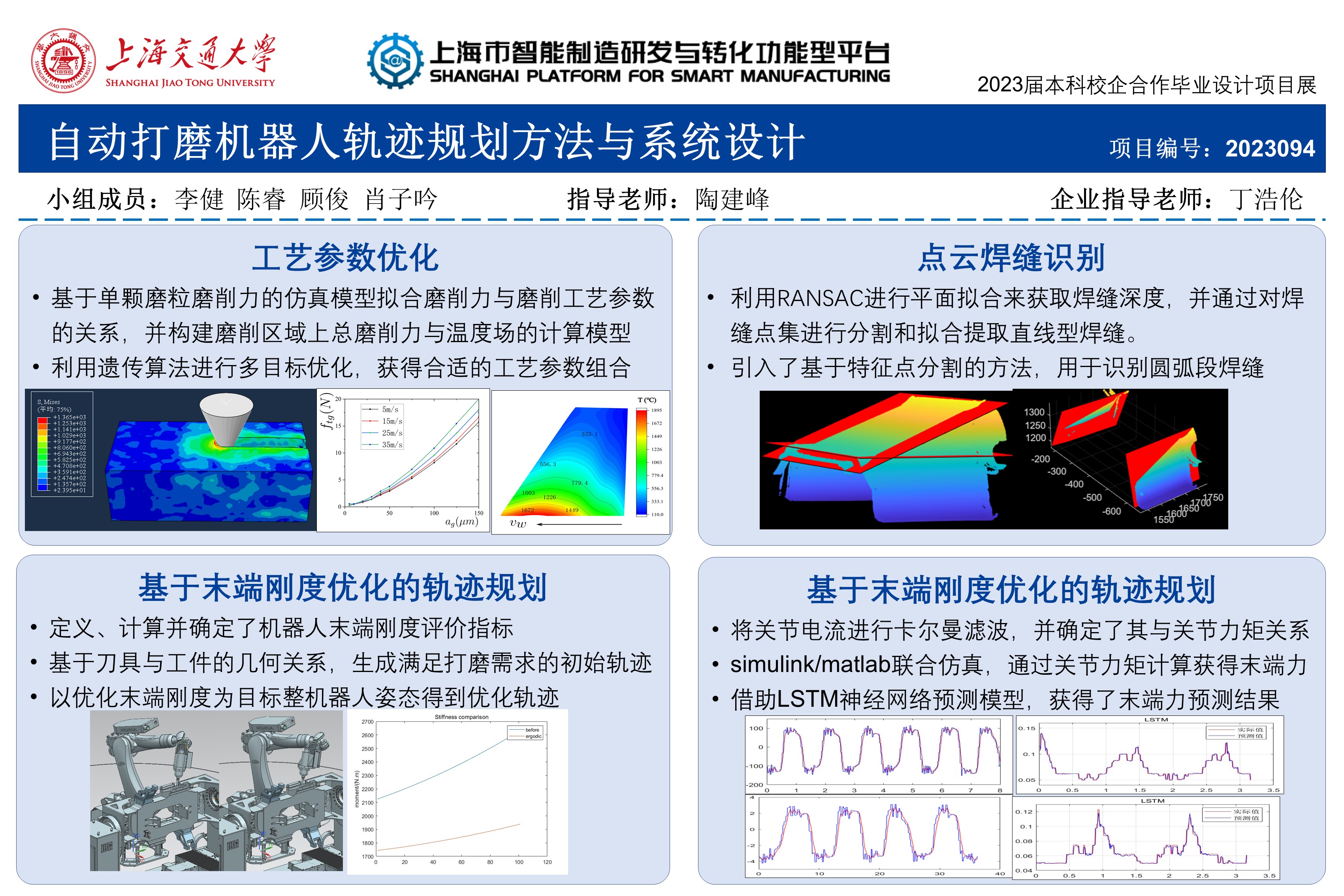
1.通过应力分析确定了焊缝打磨截面形状,设计了对应的仿形磨具,并根据磨削力、加工效率和磨削比能对磨削工艺参数进行了多目标优化。
2.针对点云焊缝的识别,通过数学计算和模型特征对比的方法并结合机器人、工件姿态等信息,成功地实现了焊缝的自动识别和分析。
3.建立了末端刚度评价指标,设计了满足打磨要求的打磨轨迹,并根据刚度评价指标在该打磨轨迹的基础上对机器人进行姿态调整,实现末端刚度优化。
4.对机器进行了动力学分析,对关节电流进行了卡尔曼滤波,借助仿真模型计算了末端力,通过LSTM神经网络模型对末端力进行了预测。




