

电泳车身表面缺陷自动打磨
机械工程资助企业: 上汽大众汽车有限公司
企业导师: 卞奇立

指导教师: 张波
项目成员: 谭彦博、李宗森、朱文铄
 项目海报
项目海报


 项目视频
项目视频
 项目简介
项目简介
项目概述
汽车车身经过电泳工艺后有存在缺陷的可能,以往的做法是经过电泳工艺后由机器人对整个车身进行抛光去除缺陷,该方法不能精确的定位缺陷位置点,需要对整个车身进行抛光,带来效率低下问题。为了提高电泳车身的质量控制水平,传统的人工检测打磨方法已经不能满足高效、准确的需求。本项目提出视觉精确定位缺陷位置-机器人自主规划抛光轨迹-机器人力控抛光的方式,提升机器人抛光效率。根据企业需求与技术分析,将项目分解为三个子项目,分别聚焦视觉缺陷检测定位、协作机器人路径自动规划、协作机器人缺陷自动打磨。
项目目标
完成视觉检测和抛光实验平台的搭建。首先是搭建基于2.5D的视觉检测平台和实现缺陷检测的功能,通过缺陷检测的机器学习方法,得到相关缺陷数据坐标。然后是机器人抛光路径优化,机器人根据视觉系统检测的缺陷位置和类型,优化抛光过程的轨迹,确保缺陷被去除,同时考虑系统避障功能。最后是抛光实验平台搭建,包括力控机器人、前端抛光工具,能够进行抛光实验验证,从而实现机器人曲面恒力跟踪方法及抛光验证,对抛光任务进行规划与优化,增强任务的鲁棒性。
项目成果
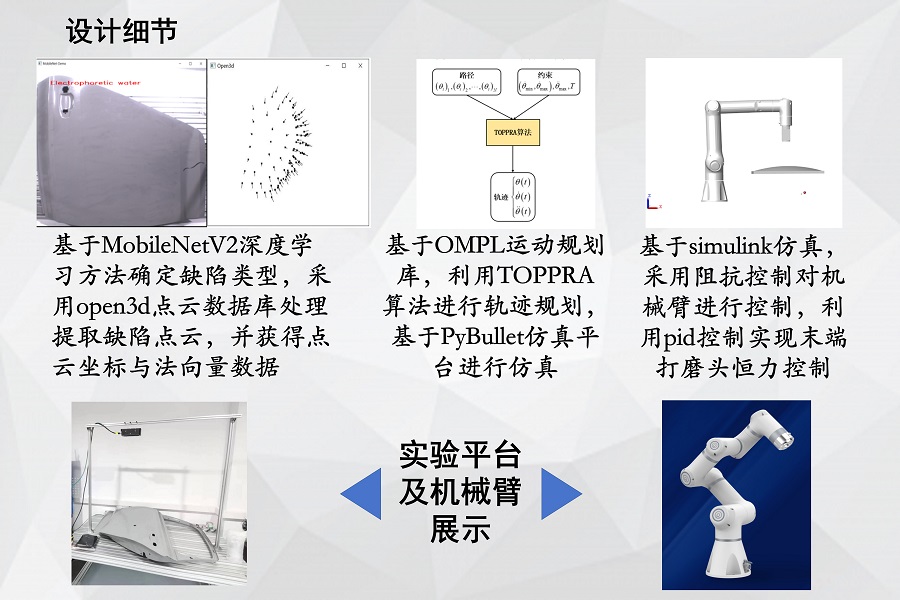
完成了视觉检测平台的搭建,并提取相关缺陷样本;采用MobileNet模型对缺陷数据集进行了训练与类型获取;采用open3d库进行了点云预处理、配准、坐标与法向量数据获取。搭建了基于视觉检测、力控抛光的实验验证平台;利用TOPPRA算法实现了机器人抛光路径和时间优化,同时考虑到了系统避障功能;以车门为研究对象,利用PyBullet仿真验证与实验平台验证。在simulink中进行了末端执行器恒力控制的代码实现和调试,通过pid控制实现了机械臂恒力打磨,同时在实验平台进行了恒力抛光的验证。




