

针对复杂曲面打磨的机器人轨迹优化研究
机械工程资助企业:
 上海电气集团股份有限公司中央研究院
上海电气集团股份有限公司中央研究院
企业导师: 张韬

指导教师: 黄诺帝
项目成员: 励雨航 周鸿运
 项目海报
项目海报

 项目视频
项目简介
项目视频
项目简介
项目概述
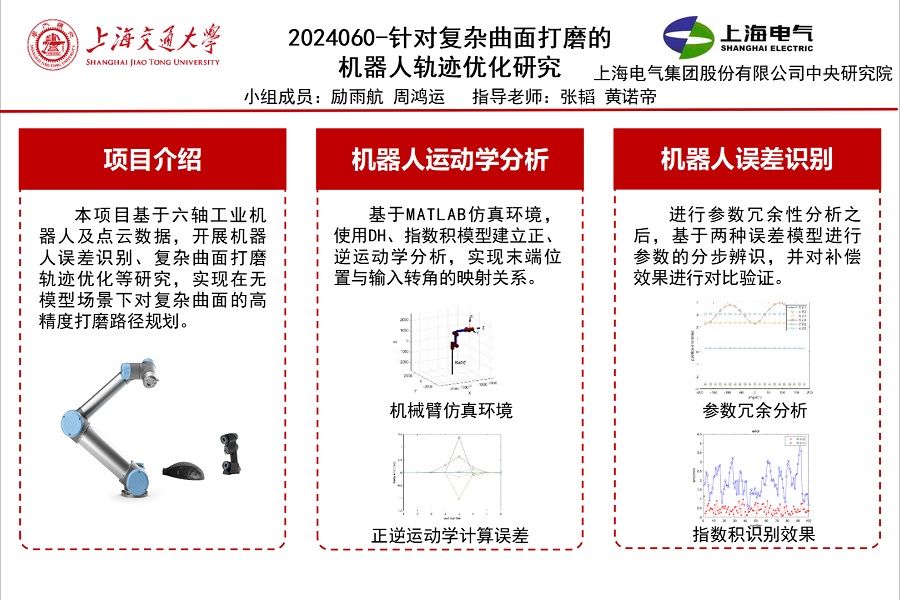
复杂曲面零部件被广泛应用在汽车、航空航天、船舶等诸多领域中,这类零件通常对表面质量要求较高,表面存在的毛刺、焊缝残高、粗糙度不达标等问题,极易影响零件的空气动力学性能和服役表现,通常需要高精度打磨来保证其表面质量。然而其中存在机器人自身精度不足、点云数据处理复杂、打磨轨迹生成困难等一系列难题。对此,本项目基于六轴工业机器人及点云数据,开展机器人误差识别、复杂曲面打磨轨迹优化等研究,实现在无模型场景下对复杂曲面的高精度打磨路径规划。
项目目标
本项目的总体目标是基于六轴工业机器人及点云数据,实现在无模型场景下对复杂曲面的高精度打磨路径规划。具体包括:基于工业机器人结构建立多种运动学模型;进行误差模型及参数冗余性的分析;实现误差参数的识别与补偿;对原始点云数据进行噪声点去除和下采样;对复杂曲面进行点云重构;完成高精度打磨路径规划。
项目成果
根据工业机器人构型,使用DH、指数积建立运动学模型,完成了正逆运动学的求解;根据运动学模型建立相应的误差模型,并完成了误差参数冗余性的分析;分别使用MDH、指数积的误差模型完成仿真环境的误差参数分步补偿,并将补偿结果可视化。
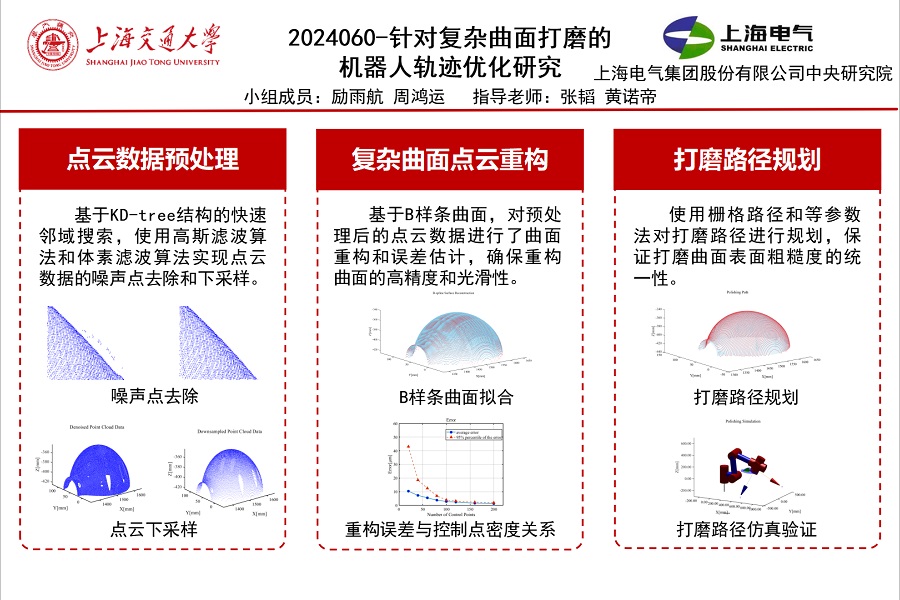
基于目标工件原始点云数据,完成边界及特征孔位识别,优化了点云数据的噪声点去除和下采样算法;通过B样条曲面实现对复杂曲面点云的高精度重构,实现对目标工件任意点点位信息及法向量信息的获取;基于栅格路径和等参数法,实现对复杂曲面的打磨路径规划。




