

灵巧苹果采摘机器人设计
机械工程资助企业:
 山东联诚精密制造股份有限公司
山东联诚精密制造股份有限公司
企业导师: 蒋磊

指导教师: 黄亦翔
项目成员: 罗诚 陈家瑜 王春骐 蒲影
 项目海报
项目海报

 项目视频
项目简介
项目视频
项目简介
项目概述
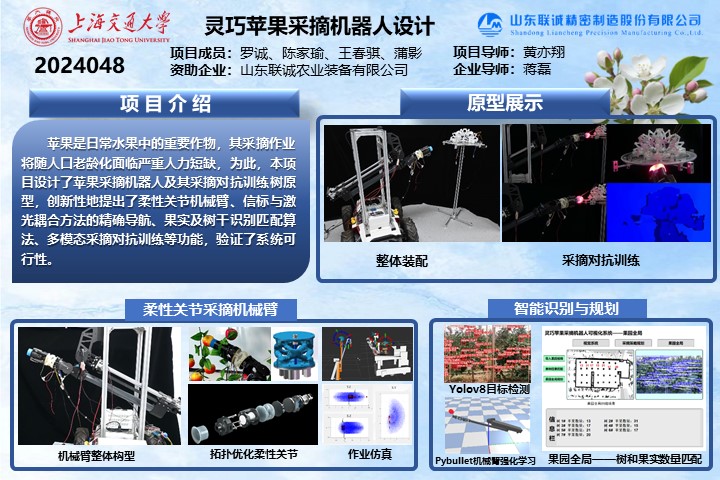
随着我国社会结构老龄化日益严重,苹果作为日常水果中的重要作物,其采摘作业正面临严重的人力短缺问题,果园无人化、智能化已然成为了智慧农业发展的主要趋势。本项目设计了灵巧苹果采摘机器人系统及其采摘对抗训练树原型,创新性地设计并实现了柔性关节机械臂、信标与激光耦合方法的精确导航、果实及树干识别匹配算法、多模态采摘对抗训练等功能,最终实现了苹果采摘机器人系统的摘果功能与采摘对抗训练。
项目目标
本项目拟设计一款具有自动采摘、自主导航、资源配置和作业评估等功能的苹果采摘机器人系统。项目共分为四个子任务:采摘机械臂的设计与控制、移动系统的设计与制造、果实采摘对抗训练机器人设计与制造,以及多场景采摘作业策略与智能体协作。该系统通过移动底盘的自主精准导航,定位至果树附近,利用智能采摘算法进行机械臂关节轨迹规划,实现采摘作业的功能,并且可以在对抗训练机器树上进行采摘作业训练。
项目成果
本项目完成了采摘机械臂的设计与控制、移动系统自主精准导航、采摘识别与机械臂路径规划、对抗训练机器树的设计与制造。本项目设计的灵巧苹果采摘机器人系统,可以完成快速无损的苹果采摘作业,在无人化果园中具有广阔的应用前景。本项目设计的对抗训练机器树,可以对采摘作业质量进行标准化分级评价,在采摘机器人研发领域也有着广阔的应用前景。本项目目前已申请国家发明专利3项、软件著作权1项,本项目设计的机械臂已参展2024 IEEE ICRA会议,另有两篇论文正在撰写中。




