

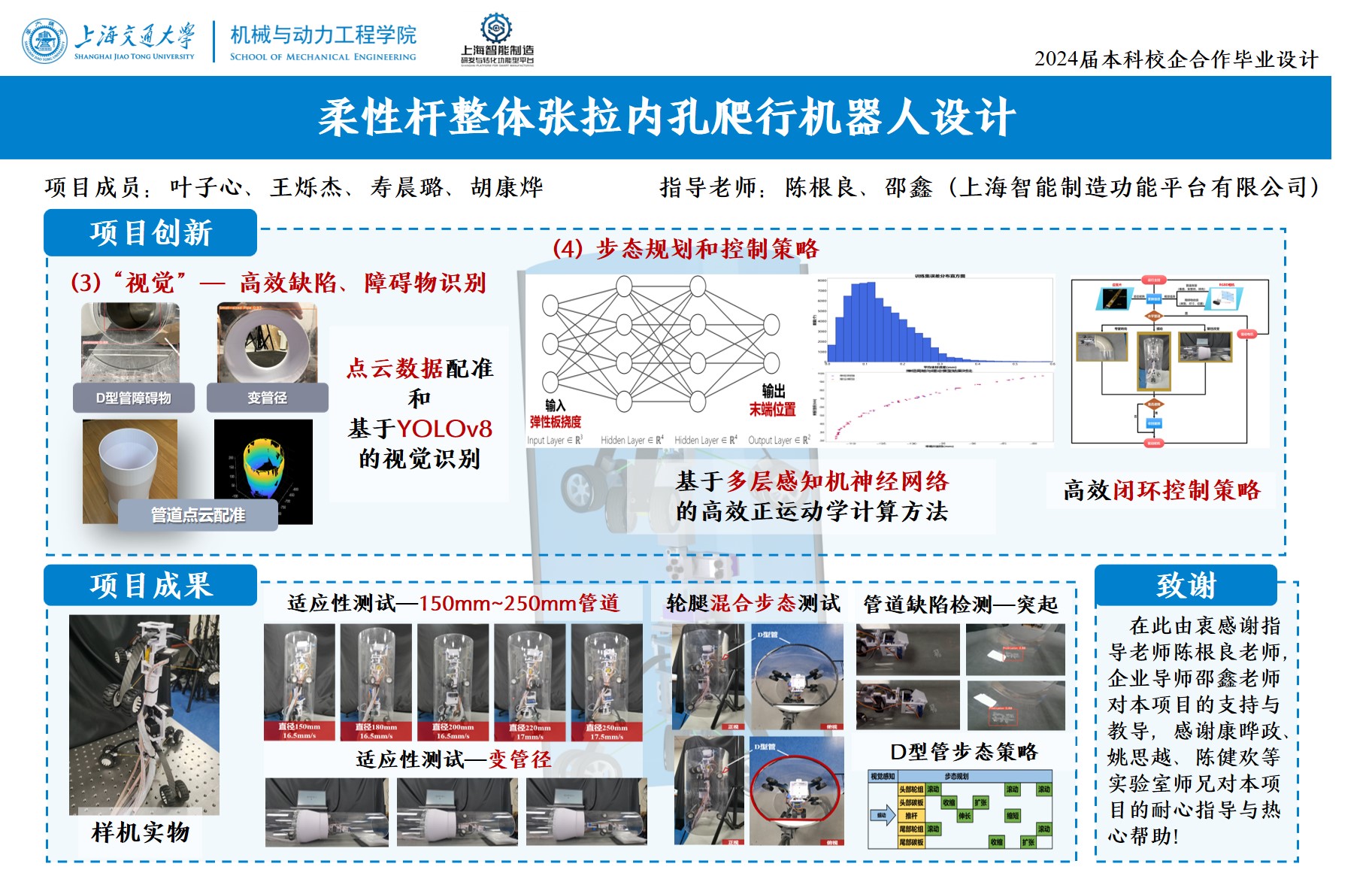
柔性杆整体张拉内孔爬行机器人设计
机械工程资助企业:
 上海智能制造功能平台有限公司
上海智能制造功能平台有限公司
企业导师: 邵鑫

指导教师: 陈根良
项目成员: 叶子心 王烁杰 寿晨璐 胡康烨
 项目海报
项目海报


 项目视频
项目简介
项目视频
项目简介
项目概述
在航空航天飞行器的发动机等复杂系统中,包含大量直径曲率不同、输送水、气的管道。为避免事故发生,管道需定期检测、探伤、维护。内孔爬行机器人可以代替人员进入狭窄危险的管道进行探测,而适应性强、检出率高是这类机器人的核心要求。本项目将弹性板引入机器人设计,利用弹性板大变形和整体张拉构型设计制造一款新型内孔爬行机器人,能够实现复杂管道轮腿双模式爬行和管道内障碍缺陷识别。
项目目标
(1)运动能力方面,实现复杂管道的轮腿双模式运行,能够通过圆管,D型管等;越障能力方面能越过或者避开裂缝、突起等。
(2)触觉感知方面,利用贴附在弹性板表面的应变片提供机器人姿态信息。
(3)视觉识别方面,利用视觉系统组件对管道内部情况进行特征提取和识别,提供机器人下一步运动的决策数据。
(4)步态规划与控制方面,通过触觉、视觉感知系统数据和机器人当前位姿,得到驱动信息,实现高精度、高鲁棒性的运动控制。
项目成果
(1) 本项目完成了柔性杆整体张拉内孔爬行机器人设计与制造,实现了直径150mm~250mm复杂管道的轮腿双模式运动,具有较高的灵活性和适应性。
(2) 本项目建立了弹性板大变形模型,设计了多通道集成的应变片电压采集系统,利用冗余数量传感器实现机器人位姿精准实时获取。
(3) 本项目基于YOLOv8算法实现了管道缺陷和障碍物类型的高效识别,并通过点云数据配准实现局部管道环境重建。
(4) 本项目设计了基于多层感知机神经网络的高效正运动学计算方法和高效闭环控制策略,实现步态规划和精准控制。




