

旋翼机器人主动视觉及其协作系统设计
机械工程资助企业:
 上海市特种设备监督检验技术研究院
上海市特种设备监督检验技术研究院
企业导师: 陈庆诚

指导教师: 董伟
项目成员: 陈柏霖,涂天宇,黄先,张弛
 项目海报
项目海报

 项目视频
项目视频
 项目简介
项目简介
项目概述
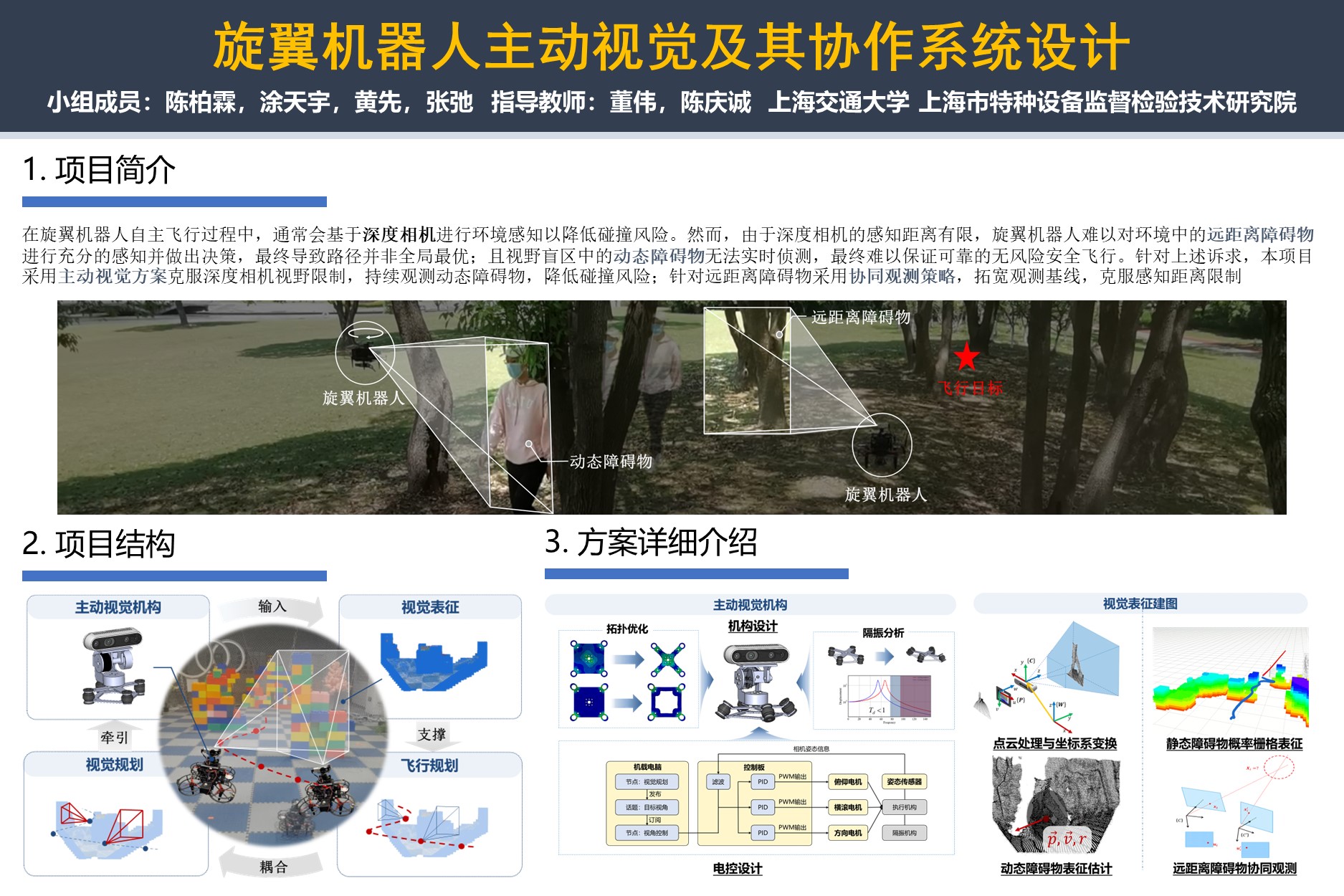
在旋翼机器人自主飞行过程中,通常会基于深度相机进行环境感知以降低碰撞风险。然而,由于深度相机的感知距离有限,旋翼机器人难以对环境中的远距离障碍物进行充分的感知并做出决策,最终导致路径并非全局最优;且视野盲区中的动态障碍物无法实时侦测,最终难以保证可靠的无风险安全飞行。针对上述诉求,本项目采用主动视觉方案克服深度相机视野限制,持续观测动态障碍物,降低碰撞风险;针对远距离障碍物采用协同观测策略,拓宽观测基线,克服感知距离限制
项目目标
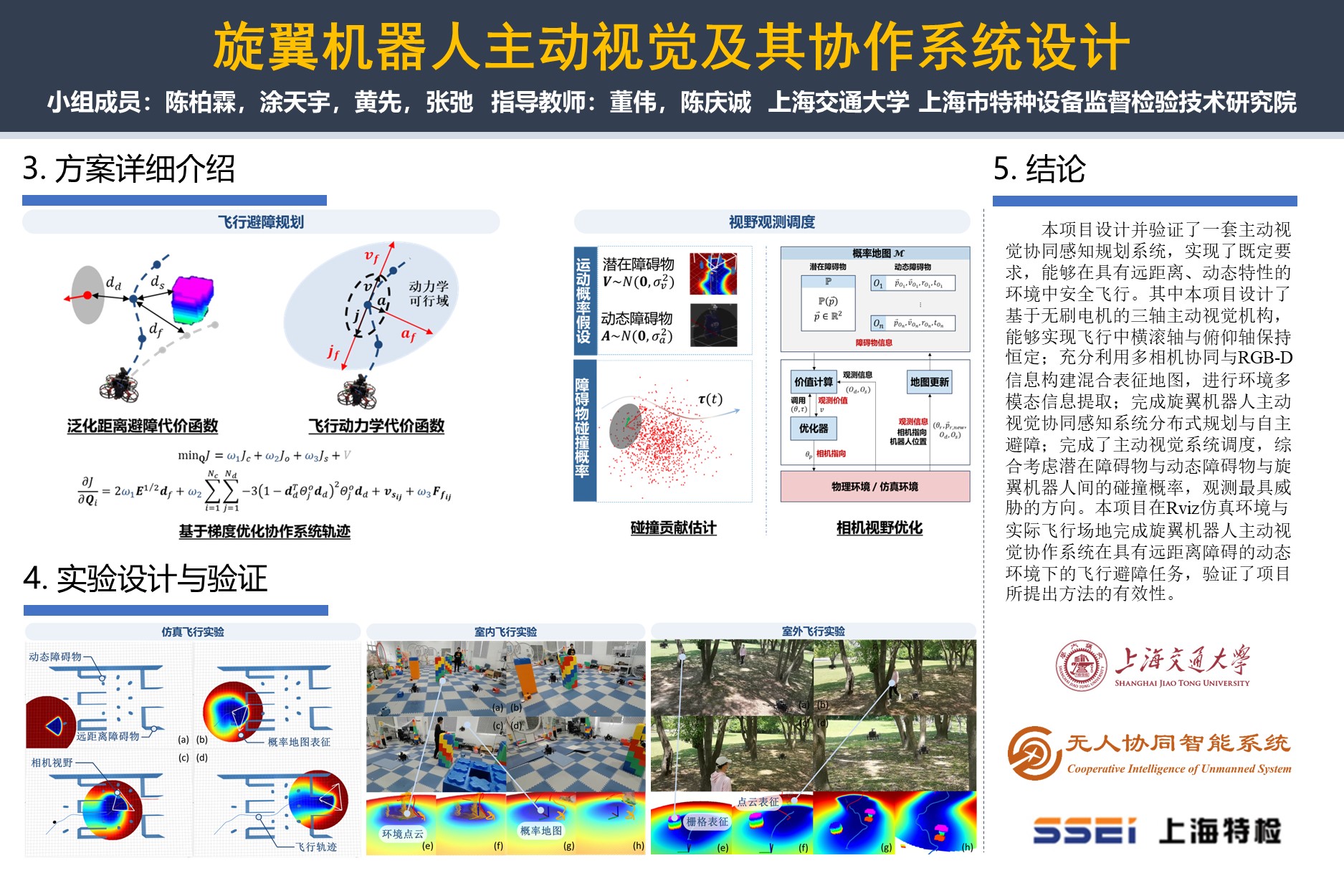
针对上述诉求,本项目设计多机协同主动视觉协同观测方法估计远距离障碍物并计算任务前瞻轨迹,并构建多目标泛化距离模型优化旋翼机器人的轨迹,降低旋翼机器人执行远距离任务的飞行时间;设计主动视觉机构控制相机旋转,利用拓扑优化与模态分析提升机构的轻便性与稳定性,利用点云与像素系语义信息构建动态障碍物包络,融合静态栅格地图与旋翼机器人协同感知语义地图对环境进行多模态表征,并设计调度算法规划主动视觉系统持续观测动态障碍物与潜在障碍物,基于多模态表征构建价值函数优化调度主动视觉机构,以提升旋翼机器人飞行穿越动态障碍物的安全性。
项目成果
(1)完成主动视觉系统机构和控制算法设计,实现主动视觉系统总重不超过300 g,视野观测清晰平稳。
(2)完成多旋翼机器人协同的深度相机视觉处理系统构建,实现障碍物快速分离表征、动态障碍物状态包络和估计以及对远距离障碍物的表征与三角定位。
(3)完成旋翼机器人飞行规划器设计,考虑多机器人间协同飞行与动态障碍物。相较于初始路径,实际路径长度缩短15%。
(4)完成主动视觉系统相机轨迹规划设计,最优化潜在动、静态障碍物碰撞障碍物观测视角,耦合考虑旋翼机器人的轨迹特性与相机转角,降低未知环境中旋翼机器人的碰撞风险。




