

青蛙具有出色的两栖运动能力,不同运动方式的协同作用使它能够在各种复杂的自然环境中实现高效灵活的运动。 仿生蛙类机器人具有良好的环境适应能力,可以广泛被应用于军事侦察、地质勘探、救援救灾等方面。
基于机械赛的仿生青蛙机器人项目,本项目计划设计出一种可以参照青蛙运动的仿生学进行跳跃并且改变通过张合改变腿部状态,以实现游泳,进而达到完成水上与陆地运动的目的的机器人。
为了实现该目标,本项目对机器人的储能方式、传动等进行了详细的建模,仿真以及关键零件的强度校核,最终利用3D打印技术制作了相关零件,完成了机器人的组装。
本项目主要追求可以实现单次远距离跳跃,同时保证机器人体型、重量、储能等符合比赛要求,在此基础上,实现腿部的张合状态转变,以实现两栖功能。
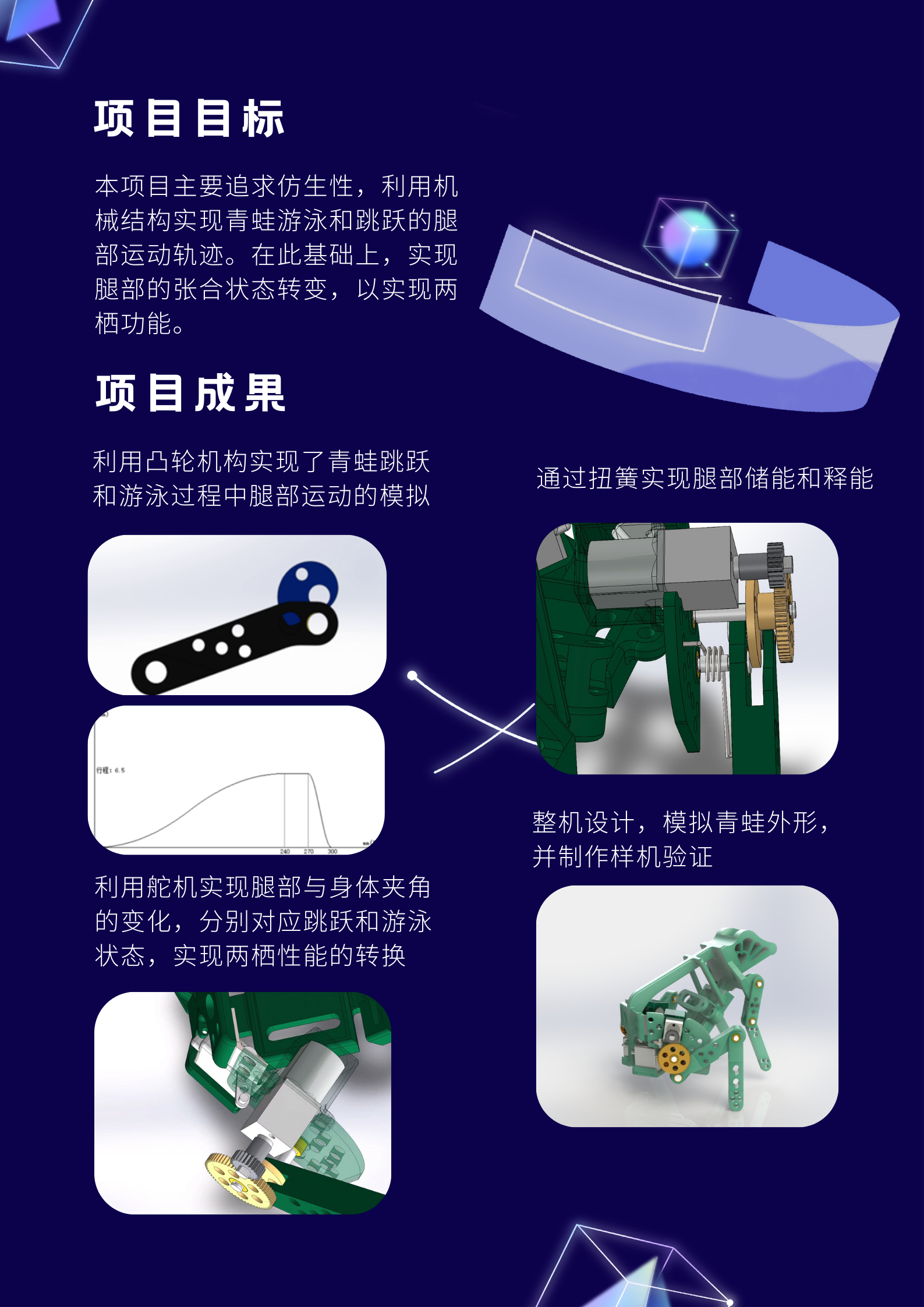
利用凸轮机构实现了青蛙跳跃和游泳过程中腿部运动的模拟,达到动作的连续性;通过扭簧实现了腿部的储能和释放;利用舵机实现了腿部与身体夹角的变化,分别对应跳跃与游泳状态,实现了两栖性能的转换。
