
自然界的动物借助跳跃运动能够跨越数倍身体尺寸的障碍物,从而增强其越障能力和环境适应能力。动物跳跃运动模式主要包含以大型动物如袋鼠等采取的连续型跳跃,和各种小型动物如昆虫和青蛙等采取的间歇式跳跃。由于机器人的跳跃性能随着机体的总质量增加而降低,现有跳跃机器人的普遍缺点是机构自由度多,机械结构与控制复杂,能量利用率低,弹跳性能差。在这一背景下,微小型化和群体协作是跳跃机器人重要的发展方向。仿生青蛙整体是一个典型的研究方向,青蛙尺寸小,在这一尺度内的跳跃机器人极少涉及多关节的复杂控制,跳跃功能的实现更多地依靠机构的优化设计,控制较为简单,爆发力强,容易实现高性能的跳跃功能。
设计并制作出满足形貌及尺寸要求的仿生青蛙架构;
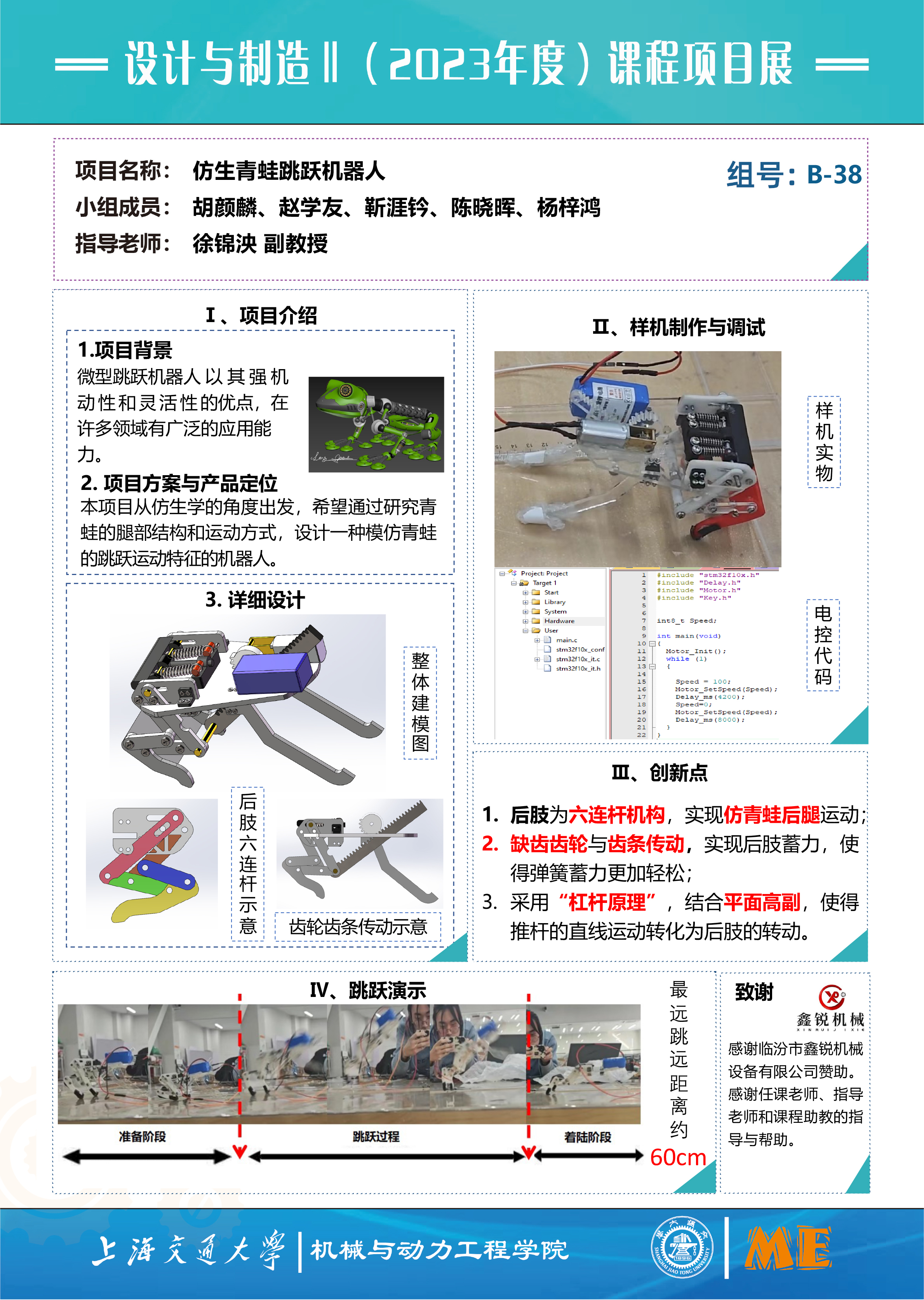
设计出简单高效的仿生青蛙前后肢结构和传动系统;
选取合适的原动机并完成控制系统的设计,期望仅采用一个原动机即可完成整个运动的驱动;
针对前肢设计出姿态调整系统与降落缓冲系统;
针对后肢,设计出合适的起跳角度,并摩擦作用发挥到最大;
完成最终三维建模,理论分析,仿真分析;制作出样机,并预计完成3—4倍体长距离的跳跃。
实现对青蛙后肢具有仿生运动特性结构的设计;
实现青蛙自动化跳跃,最远跳远距离约60 cm,能实现平稳落地、连续跳跃、越障等功能
