
投掷机器人一直是机器人比赛中的热门项目,因此对竞赛用的投掷机器人的研究已较为成熟。如果将这些竞赛项目中的投掷机器人加以改造,就能够得到发球机等商用机器人,拥有很大的市场潜力。随着网球、乒乓球等球类运动在近年来的发展,市场上对发球机器人的需求也在不断提高,投球机器人拥有较大的市场。
要实现投掷动作,最主流的方案有:(1)摩擦轮方案:(2)气动方案;(3)弹簧蓄能方案。本小组考虑到发球结果的精准度、稳定性等条件,最终选择了摩擦轮方案。
A. 完成挑战赛所给任务
在总限时五分钟,内完成挑战任务:将网球依次投入五个大小不同的目标区域。若无法完成任务,尝试尽可能多的将球投入目标区域。
目标区域如下图所示,目标区域自左向右直径分别为50 mm,40 mm,30 mm,20 mm,10 mm,各区域间距均为10 mm,矩形范围内为禁止区域。

图1 目标区域示意图
B. 对设计的装置进行改良,分析不足之处
分析机构的总成本、装置机构及结构设计合理性、完整性和创新性;预测装置可靠性和预期使用寿命。对于项目中不合理之处进行反思和改正。
A. 整体建模与机构示意图
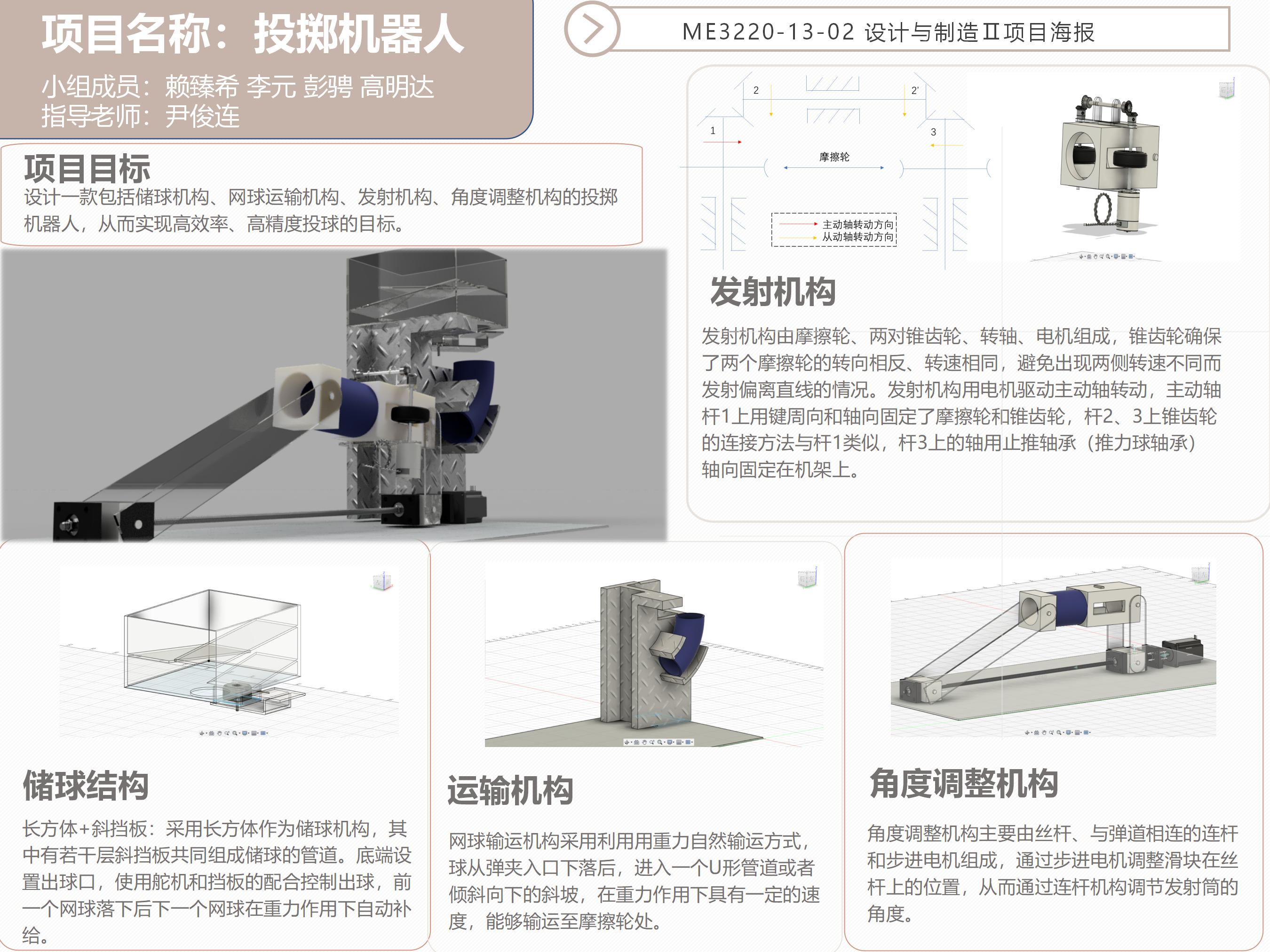
整体结构由储球机构、运输管道、发射机构、角度调整机构、发射平台与支撑组成。
图2 3D建模渲染图

图3摩擦轮定轴轮系建模示意图

图4齿轮机架建模示意图

图5角度调整机构示意图

B. 机构运动分析、有限元分析
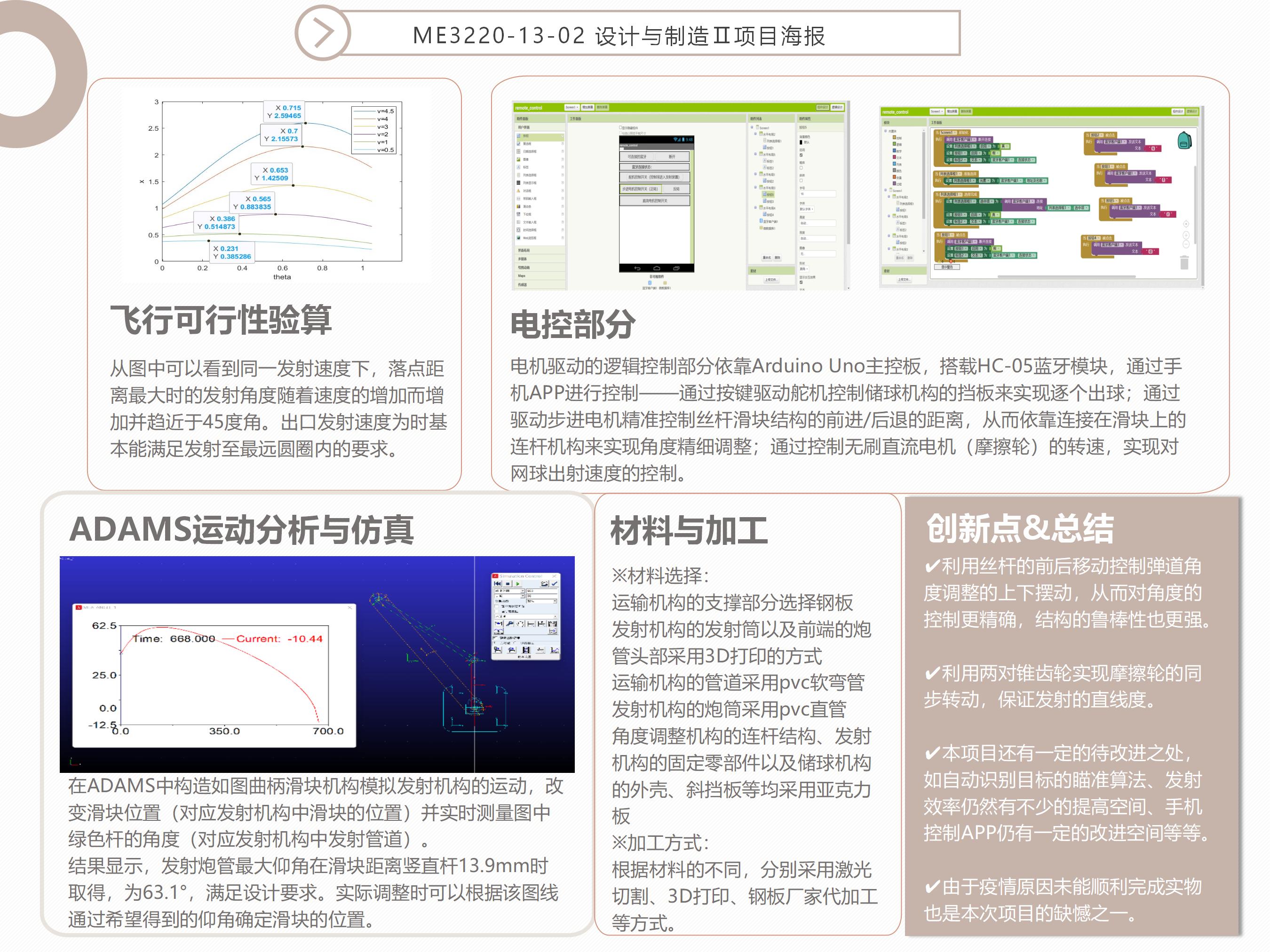
图6落点距离与发射角度、发射出口速度关系图

从图中可以看到同一发射速度下,落点距离最大时的发射角度随着速度的增加而增加并趋近于45度角。出口发射速度为[0.5,4.5]m/s时基本能满足发射至最远圆圈内的要求。
图7 ADAMS运动分析

结果显示,发射炮管最大仰角在滑块距离竖直杆13.9mm时取得,为63.1°,满足设计要求。实际调整时可以根据该图线通过希望得到的仰角确定滑块的位置。
图8有限元分析


C. 电控模块


D. 总体装配


