
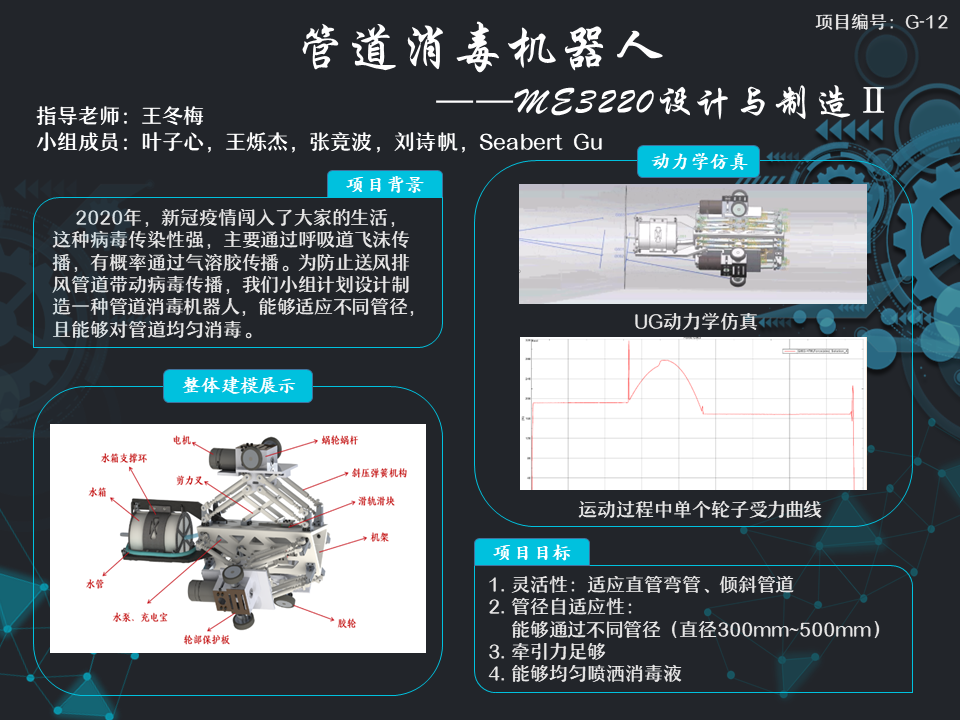
管道,遍布在我们生活的四处,从每家每户到商场大楼、图书馆,都能见到各种各样的管道。这些管道在日常生活中难以清洁,很容易变成清洁死角,尤其是垂直设立的长管道,拆卸清理都变得不易。时间未经清洁的管道不仅滋生细菌、产生异味,在新冠疫情的当下,还容易成为飞沫传输的途径。管道消毒机器人项目,意在设计出一种可以清理消毒管道的方案,即可以适应不同管径(本项目为直径30cm~50cm)、各种倾角的管道,且可在管道内部移动、喷洒清洁的机器人,使得平时难以清洁的卫生死角得以清理。
(1)机器人有足够的灵活性。机器人运行工况复杂,为了得到良好的运行效果,机器人应适应直管弯管、倾斜管道等。
(2)机器人具有管径自适应性。机器人应具有变径机构,保证机器人在不同管径的管道环境中工作,增加机器人的普适性。
(3)机器人应该具有足够的牵引力。机器人需要携带电源和其他执行机构,必须具有足够的动力作为保障,尤其是工作在坡度较大的管道环境。
(4)机器人能够均匀喷洒消毒液。机器人需要达到均匀消毒管道的目标,实现其应用价值。
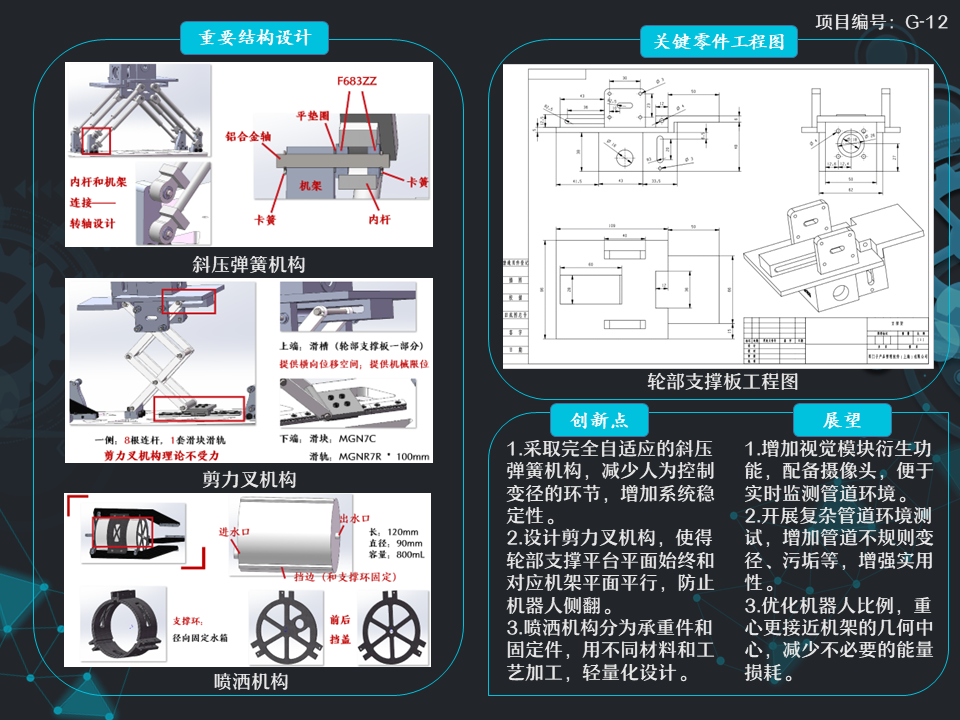
(1)完成驱动机构设计。变径采取完全自适应的斜压弹簧机构,减少人为控制变径的环节,增加系统稳定性。设计剪力叉机构,使得轮部支撑平台平面始终和对应机架平面平行,防止机器人侧翻。轮部机构采取蜗轮蜗杆传动。
(2)完成喷洒机构设计,使得机器人能够均匀喷洒直径为30cm~50cm的管道,且将其分为承力件和固定件,用不同材料和工艺加工,轻量化设计。
(3)管道消毒机器人整体进行UG动力学仿真,确保在倾斜和竖直管道中均可以运动。对所有承力件进行强度校验,对所有轴承进行寿命计算,确保机器人能够稳定工作。
