
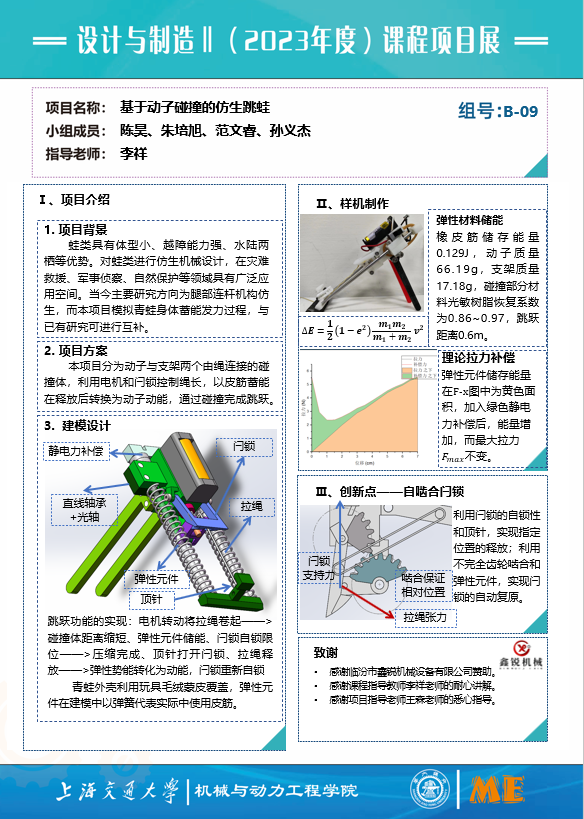

青蛙具有体型小,越障能力强、水陆两栖等优势,对蛙类进行仿生机械设计,在灾难救援、军事侦察、自然保护等领域具有广泛应用空间。当今主要研究方向为腿部连杆机构仿生,而本项目模拟青蛙身体蓄能发力过程,与已有研究可进行互补
(1)严苛的尺寸限制:
整机的静态尺寸要求限制在10cm*10cm*10cm内,导致涉及电控的元件均难以安装,更遑论远程遥控了。因此我组的设计思路是完全刨除电控部分,仅使用机械结构使作品能自行储能、激发、跳跃。
同时,由于尺寸和重量的要求,传统的四杆机构力作用距离有限,且重量较重,不适宜作为跳跃机构,故我组选择使用动子碰撞的方式完成跳跃。
(2)电池作为原始能源:
由于电池电压有限,且该尺寸下舵机功率较低,需要采用减速比
较大的舵机或者而外添加减速箱、蜗轮蜗杆机构等。介于后两者的加工难度高、安装精度要求高,我组选择了网上可购买到的减速比最大的N20减速电机并选用12V的微型电池来供电以此获得最大扭矩。
(3)跳跃过程中不允许零件脱落:
要求限制了整机需要在储能、跳跃过程中保持完整。由于我采用的是动子碰撞的原理,故两个碰撞体间必须有足够强的连接,以避免起跳时二者分离。
该项目有以下创新点:利用闩锁的自锁性和顶针,实现指定位置的释放;利用不完全齿轮啮合和弹性元件,实现闩锁的自动复原
