
跳跃运动,与轮式、履带式、步行等移动模式相比,具有更能适应多种地形、快速闪躲、越障能力更强等多重优点。因此,跳跃机器人在星际探测、战场侦察等方面有着广阔的前景。小体型跳跃机器人可大致分为非仿生型跳跃机器人和仿生型跳跃机器人。根据所利用的能源形式的不同,可分为机械弹性能、化学释放能和场力作用能三类。出于课程学习内容、经费和组装难度等多方面考量,因此本项目旨在研发以机械弹性能为能源、辅助柔性框架结构作为落地缓冲装置的小型跳跃机器人。
设计出的小型跳跃机器人整体尺寸符合挑战赛规定,在材料和结构上进行轻量化处理。利用弹簧作为储能元件,利用低重心、梨形外壳实现不倒翁原理,在底座部分设计可伸缩支架进行跳跃方向调节。能够跳跃超过100cm的高度,可以进行跳跃方向的调节,并且可以利用不倒翁原理保证在落地后自动恢复平衡,继而进行下一次跳跃。
设计出可进行连续跳跃超过100cm的不倒翁型跳跃机器人
通过结构设计与材料选择,将重量控制到2.4kg,保证整体上的轻量化处理
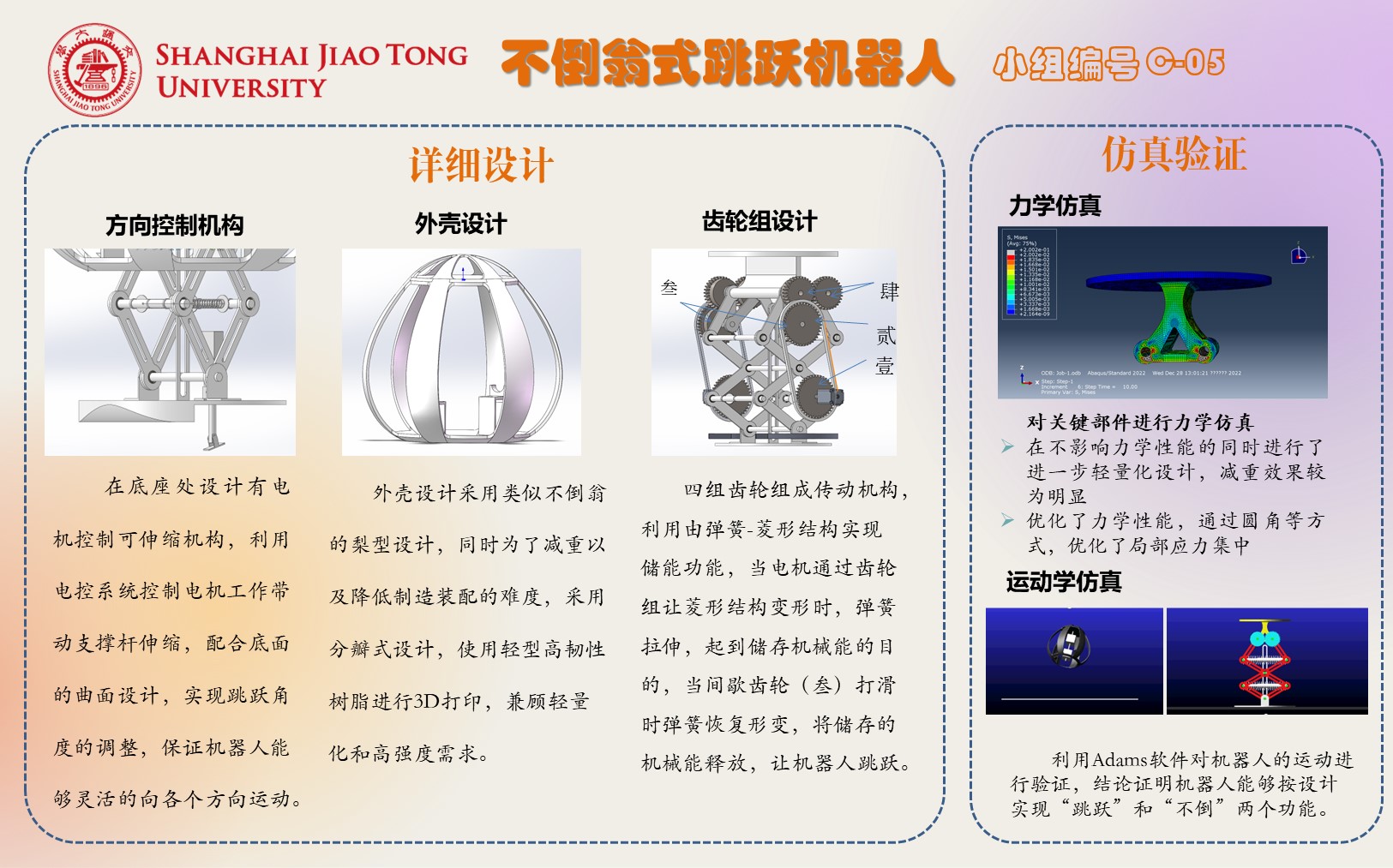
底部设计可伸缩支架和电控系统,通过红外传感器实现人为控制跳跃,压力传感器实现控制跳跃中电机转动,从而在整体上实现跳跃方向调节。
通过仿真处理,进行轻量化处理,优化力学性能,通过圆角等方式,优化了局部应力集中的缺点。
