
本项目的开发设计主要针对于课程挑战赛的要求并考虑竞赛的竞争需要,但同时兼顾投掷机器人的投掷属性在军事、运动等其他领域的应用价值。开发前期我们从投掷机器人功能属性权重、投掷机器人在不同领域市场应用价值等方面进行了市场调研,发现在投掷机器人的投掷结构的设计和弹性储能装置的设计是整个项目中最重要的属性,因此整个项目以这两方面为核心进行设计。最终本项目可以实现通过对于角度的调节改变网球出射角度,通过空间凸轮结构进行储能发射,从而达到连续定点投掷的效果。
项目挑战赛的比赛要求为——在连发三个网球之内不存在人为干预的前提下,实现投掷装置在地图边界外完成五次网球投掷,将五个小球分别投掷到地图内的五个圆圈内,五个圆圈直径从大到小依次为50cm、40cm、30cm、20cm、10cm。若两组项目产品五次投掷均位于圆圈内,则用时较短者胜出。
在完成挑战赛要求的基础上,我们将本组产品的目标定位为可以在不存在人为干预的情况下通过调节炮筒角度连续投掷五次网球,并将网球分别投入到五个圆圈内。
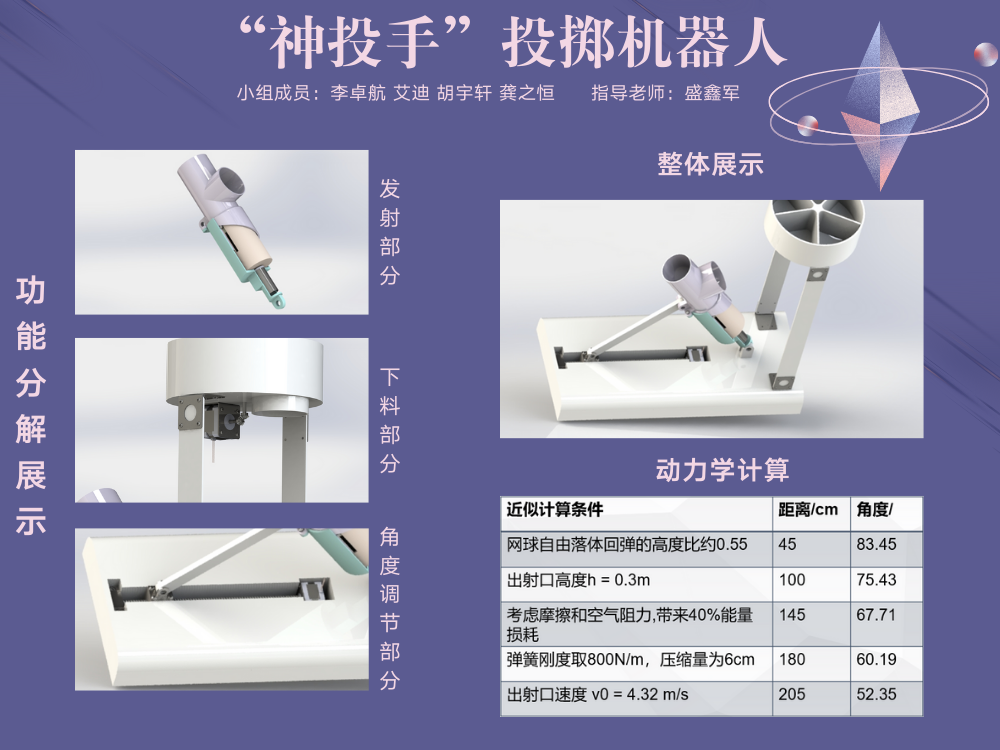
整个项目产品主要分为下料部分、发射部分、角度调节和装置固定部分。下料模块通过控制下料盘的扇叶转动将网球扫入连接管道进入发射装置;发射模块通过电机带动炮筒内的枪膛转动,通过空间凸轮使顶针压缩弹簧储能,顶针释放时带动网球运动,从而实现网球的连续发射;第三个模块通过步进电机带动丝杆转动调节丝杆螺帽的位置,利用连杆结构改变炮筒的发射角度。项目使用arduino开发板连接ps2手柄进行远程控制,可实现在不存在人为干预的情况连续投掷五次网球,并且投掷距离在经过计算仿真和后期调试即可与发射角度一一对应,即可通过调节丝杆螺帽位置确定炮筒角度,进而将网球定点发射。
