
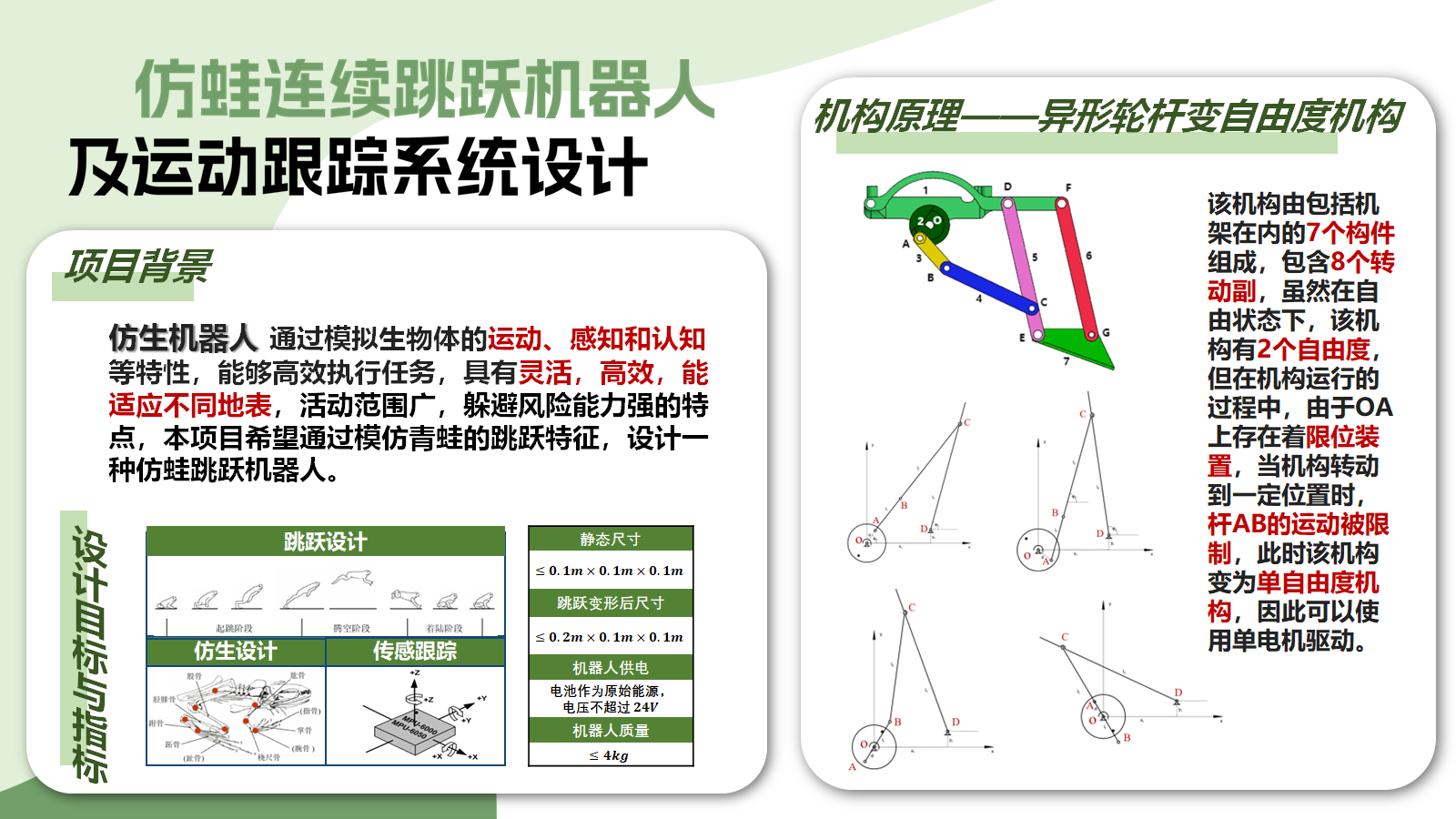
本项目来自于机创赛高性能仿生青蛙项目,着重于青蛙的仿生机构设计与跳跃能力的实现。本项目设计了一款仿生青蛙,将双轴电机结合异性轮杆变自由度机构带动平行四杆后肢变形作为储能和释放机构,将前肢作为支撑和缓冲机构,并结合惯性加速度传感器、力传感器和激光测距传感器等多种传感器辅助机构的优化。
首先,项目应当满足机创赛规定的设计指标:
1. 质量在4kg以下;
2. 静态尺寸在0.1m×0.1m×0.1m以内;
3. 动态尺寸在0.2m×0.1m×0.1m以内;
4. 电池电压在24V以下。
此外,为了提升仿生青蛙的性能,实现连续跳跃的目标,除机创赛规定的设计指标外,对于项目整体,我们还希望达到的目标有:
1. 尽量减少机构的自由度,从而减少电机数量,在减轻总体质量的同时,能够保证双腿运动的同步性。
2. 尽量简化机构,减少不必要的机构运动,保证总体运行的可靠性,并减轻质量,减小总体尺寸。
3. 通过合理选材及优化计算,在保证强度的情况下进行轻量化结构设计,同时合理布局,调整重心位置,防止运动过程中的偏离和倾覆。
4. 通过对释放机构的设计,实现连续跳跃,且能够尽量减小蓄能时间,保证较高的跳跃频率。
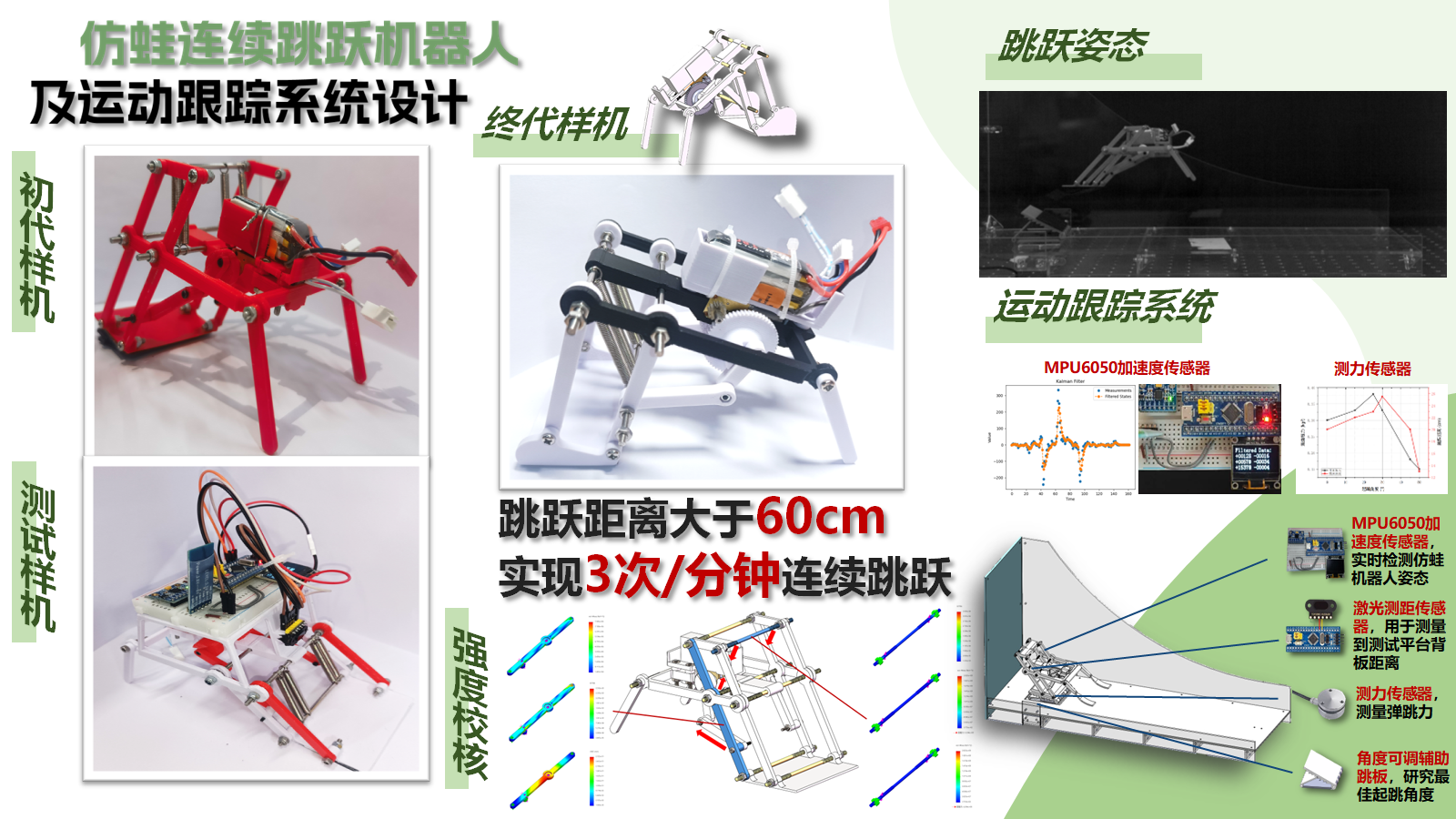
基于以上项目目标,我们制作了一款模仿青蛙骨骼结构,能够实现跳跃后平稳落地,且在无外力作用下能实现连续跳跃的仿生青蛙。
机构基于青蛙的骨骼结构,整体主要分为前肢、机架和后肢三部分。双轴电机布置在机架正中,带动异形轮杆机构拉动后肢旋转从而拉伸弹簧储存能量,通过改变拓扑结构实现储能与释放一体化。
此外,我们还搭建了一套测试系统,分为机载测试平台(包括TOF激光测距传感器、MPU6050加速度传感器)和固定测试平台(包括力传感器和辅助跳板)。通过多传感器检测仿生青蛙全过程的运动相关参数,用以指导机构几何尺寸、力学性能和控制参量的优化。
本项目完成了预期目标,仿生青蛙能够实现连续跳跃的功能,其中二代机可以实现间隔6.5s的连续跳跃,单次跳跃距离大于10cm,三代机可以实现间隔22s的连续跳跃,单次跳跃距离大于50cm。
