
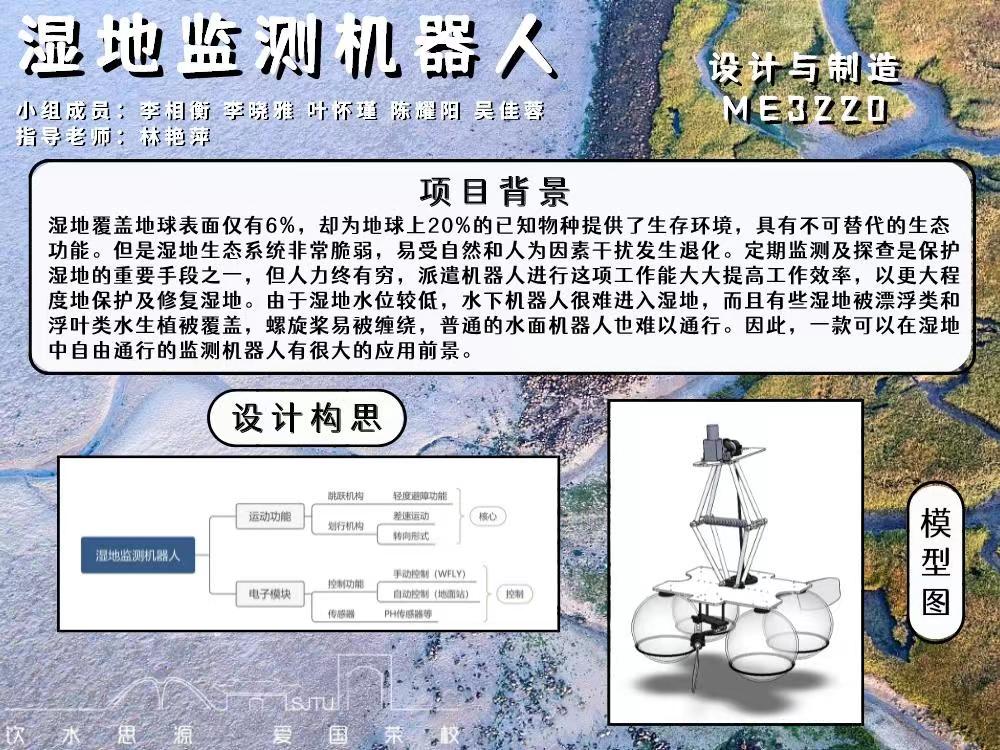
中国湿地面积占世界湿地的10%,持续监测及大面积探查是湿地保护的重要手段之一,但人力终有穷,派遣机器人代替人类进行这项工作能大大提高工作效率,更大程度地保护及修复湿地。然而现有机器人在湿地中的通行有以下两个方面的困难:湿地水位较低,水下机器人很难进入湿地;有些湿地被漂浮类和浮叶类水生植被覆盖,螺旋桨易被缠绕,普通的水面机器人难以通行。本项目旨在设计制造一款可以在湿地中自由通行的监测机器人。
机器人需要能够在低水位水面上稳定航行,面对“拦路”的浮水植物时,要具备跳跃功能快速跨越它们并平稳落下继续运动。面对不可跨越的障碍物,机器人需要具备滑行前行和滑行转向的能力,使得机器人可以顺利绕过障碍。机器人需要能够根据电控系统实现预定的运动轨迹,应当能够在特定的范围内根据指令记录湿地一定区域的生态环境状况,测量水位、温度、湿度等相关数据并记录,实现机器人湿地环境监测的需求。
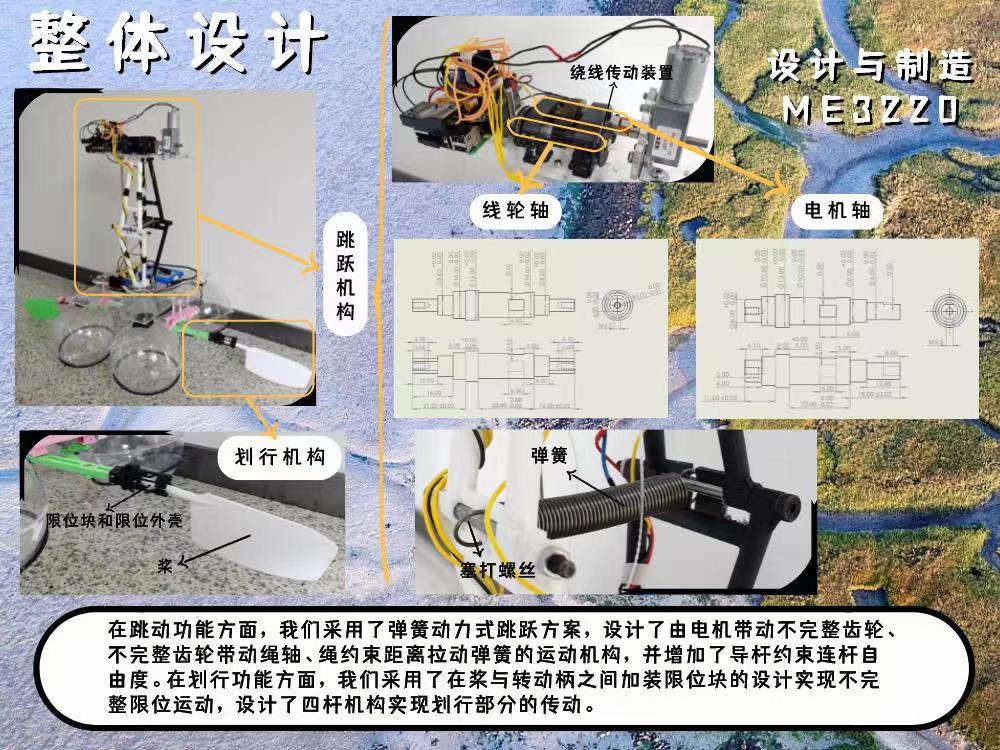
在跳动功能方面,我们采用弹簧动力式方案,设计了由电机带动不完整齿轮、不完整齿轮带动线轴、绳约束距离拉动弹簧的运动机构,当不完整齿轮与完整齿轮啮合时,弹簧拉伸储能,当不完整齿轮不与完整齿轮啮合时,弹簧收缩释放能量,机器人跳起,基本实现了跳跃功能。我们增加导杆约束连杆自由度以约束跳跃后的运动方向。在滑行功能方面,我们采用在桨与转动柄之间加装限位块的设计实现不完整限位运动,设计了四杆机构实现滑行部分传动,实现了滑动前行及差速滑行转向。电控部分集成传感器在控制运动的同时控制数据采集,实现监测的目的。
