
随着机器人技术的发展,仿生学为设计灵活机器人提供了新思路。青蛙具有出色的跳跃能力,对于复杂环境的探索及避障有较大潜力。然而,目前跳跃机器人难以实现姿态控制,其跳跃距离及稳定性、灵活性仍存在不足。
本项目旨在设计和开发一款仿生青蛙跳跃机器人,通过模拟青蛙的结构与跳跃运动,借助传感器数据实时调整在空姿态,保证青蛙稳定性的同时获得较远跳跃距离,具体达到以下目标:
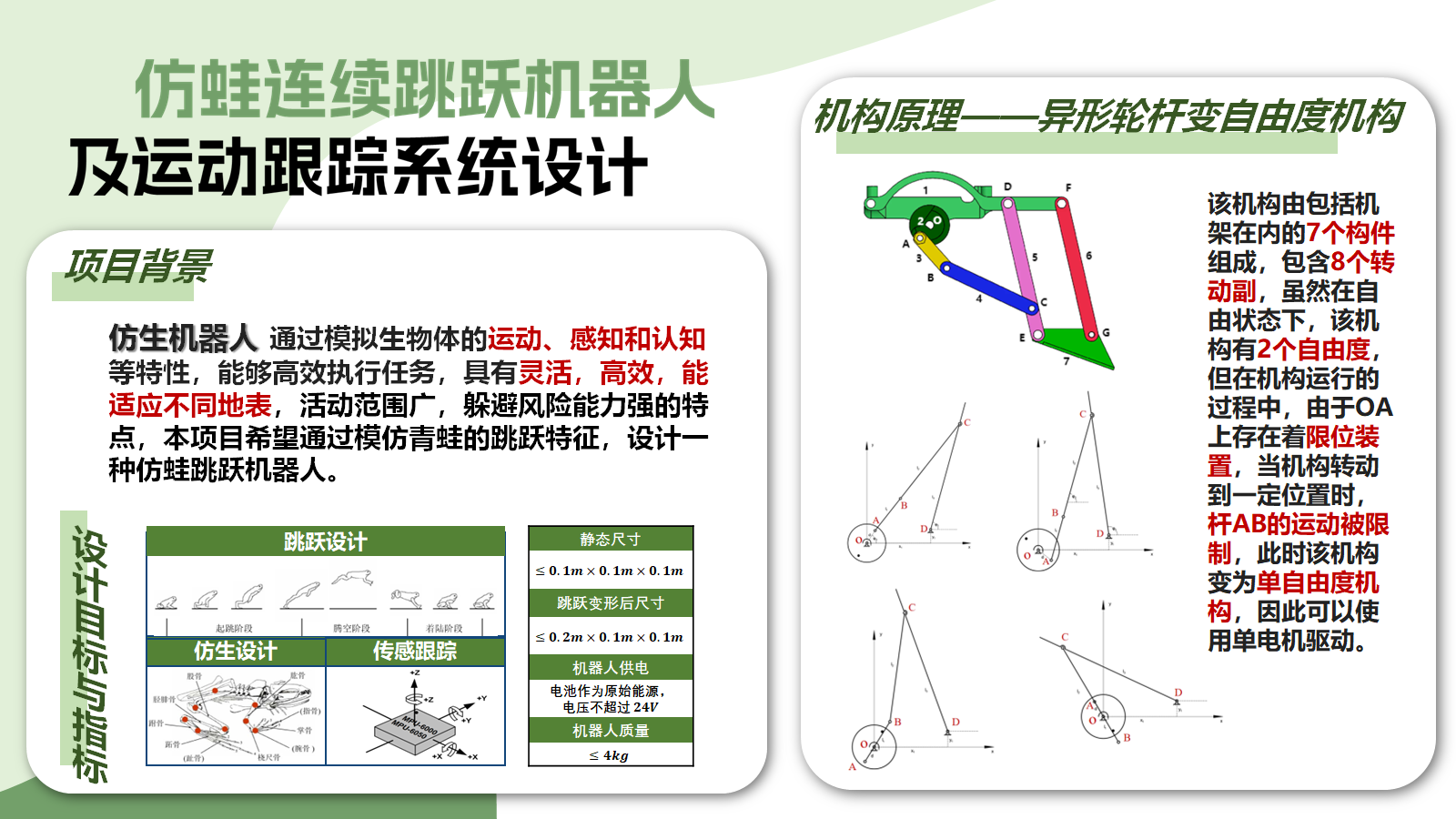
(1) 产品尺寸控制在10cm*10cm*10cm以内,最大展开体积控制在20cm*10cm*10cm以内;产品重量不超过1kg;
(2) 通过机械设计实现一定的运动控制,包括运动恢复阶段的控制等;
(3) 产品通过电力驱动,可以实现较长时间运行;
(4) 产品可以实现1-2倍自身尺寸的前进距离;
(5) 产品可以通过前肢调整姿态保持稳定,必要时添加其他控制手段控制姿态;
在项目实施阶段,我们首先进行了对青蛙跳跃生物力学的深入研究,以获取关于肌肉力量、骨骼结构和运动模式的关键信息。接着,我们采用现代机械设计工具,设计了机器人的骨架和运动系统,并集成了先进的控制系统,以实现准确的跳跃运动。最终的成果有:
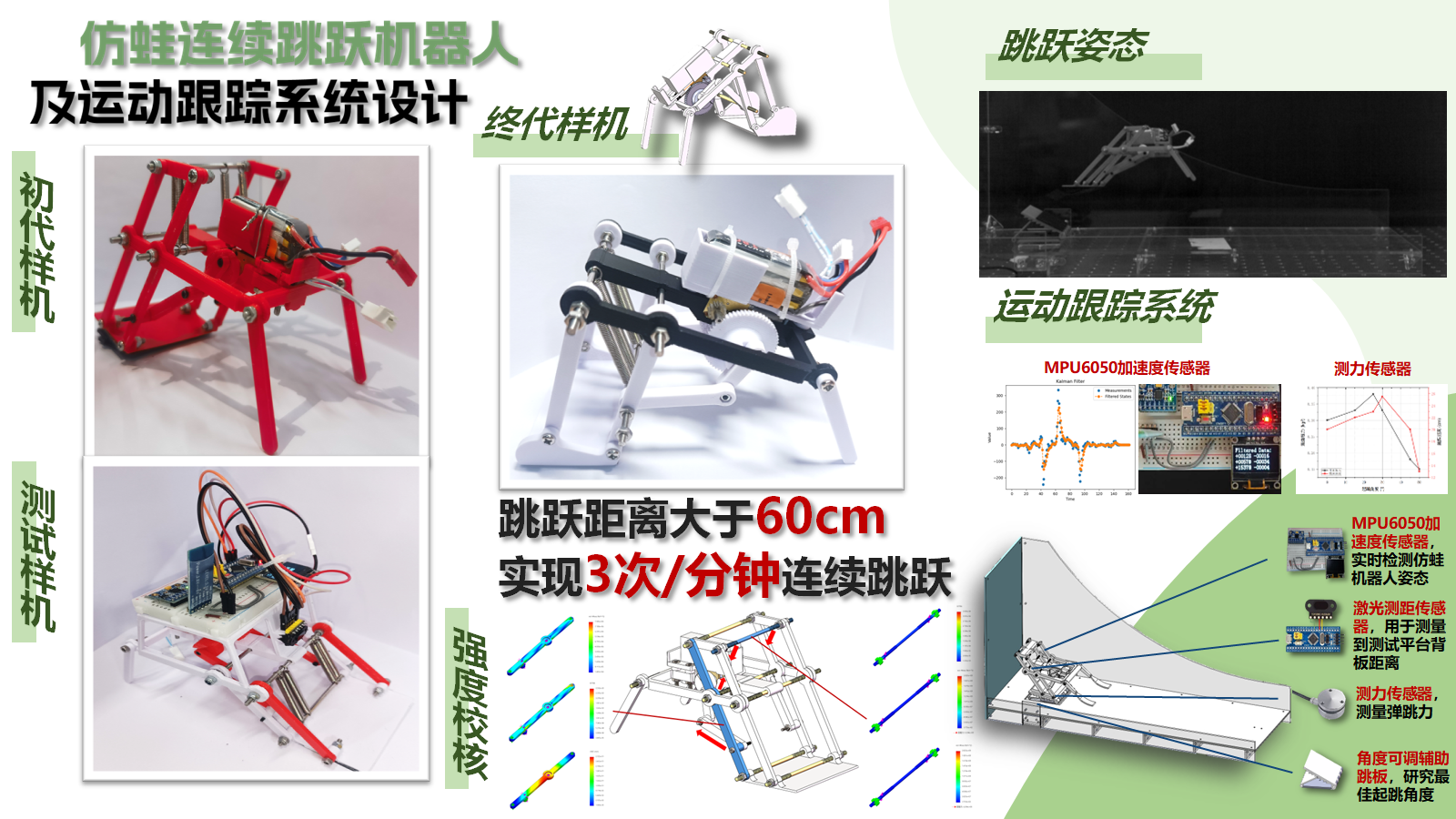
(1)高度仿蛙的机械结构与运动方式: 成功设计出与青蛙高度相似的跳跃机器人的轻量且稳定的机械结构,模仿青蛙蓄力、跳跃、姿态调整的运动方式;
(2)在空姿态的实时反馈与调整: 开发了基于传感器数据的实时反馈闭环控制系统,使机器人能够在跳跃过程中调整姿态,以提升平衡能力和跳跃距离。
(3)实际应用展望: 通过项目的研究和开发,为未来在救援任务、勘测工作等领域中应用仿生青蛙跳跃机器人奠定了基础,为机器人技术的发展贡献了有益的经验和成果。
