

传统的农业采摘工作通常需要大量的人力投入,而且采摘过程中的劳动强度高、效率低。随着人工成本的不断上升和劳动力短缺的问 题日益突出,农业采摘机器人成为一种解决方案,旨在提高采摘效率、 降低成本,并缓解劳动力需求的紧张局势。项目拟开发一款农业采摘机器人,其应用可以根据不同的农作物和地域条件进行定制化,如果园采摘、蔬菜农田、棉花采摘等。
1. 设计出适合果园地形的全地形底盘
2. 设计出多自由度的机械臂,对摘取对象进行定位
3. 设计出适合多数采摘任务的末端执行器
4. 设计相应的储存装置
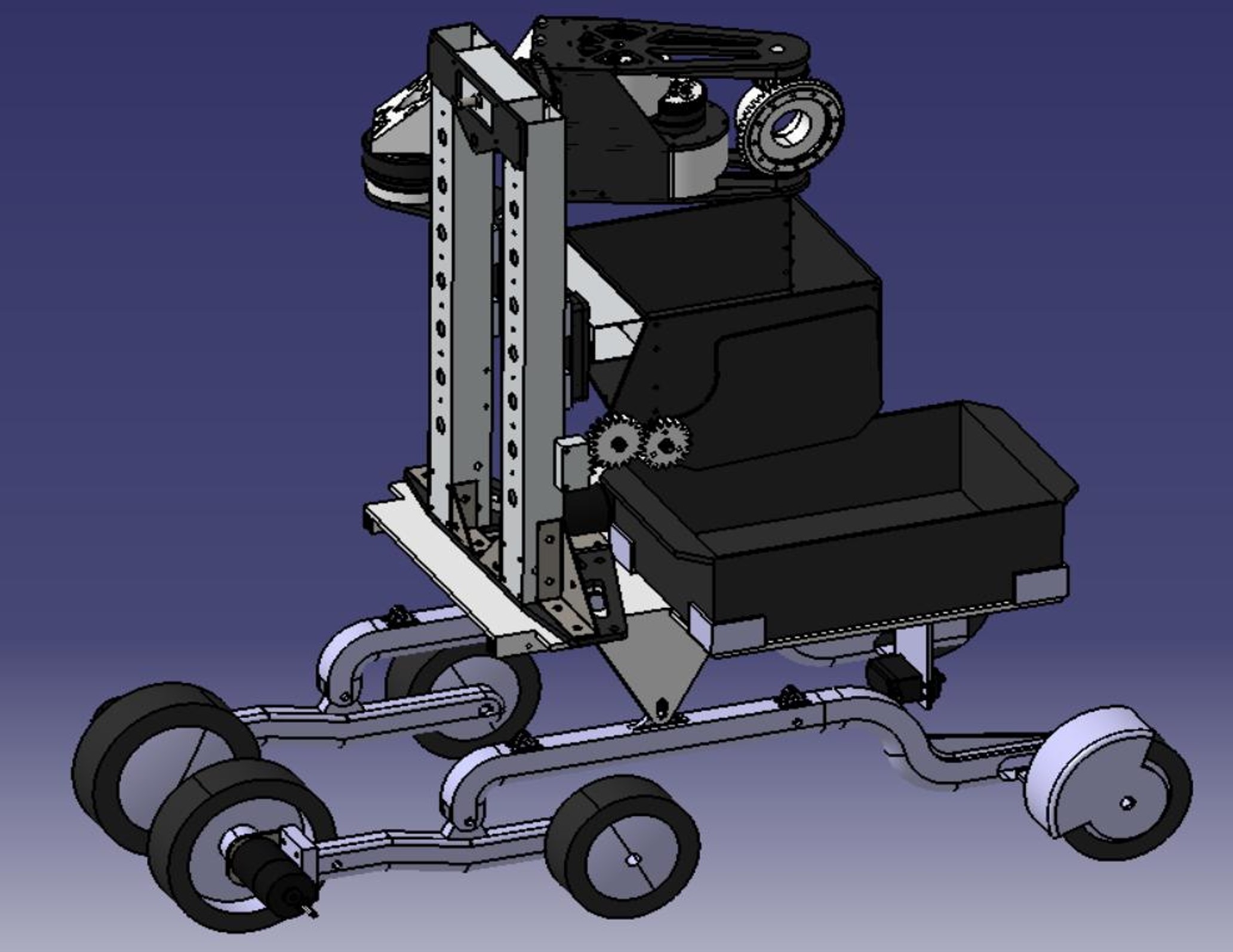
本项目采用Solidworks和Catia自主设计并建模了百余个零件,包括采用简化型反向主副摇臂式悬架的六轮底盘和相应的阿克曼转向机构、采用同步带驱动的机械臂抬升机构和集成在其上次级储物箱、采用同步带与锥齿轮的正交轴关节模组及其行星减速器、采用真空海绵吸盘的摘取机构。设计时综合运用课内知识计算连杆参数、减速比及齿轮布置,并采用了Linkage、Adams进行了相应的运动仿真,采用Ansys进行了强度校核。整体制造大量采用3D打印技术,成品与设计一致性较高。
