
本项目通过设计一款仿青蛙遥控变距跳跃机器人,实现高效仿生跳跃、距离可遥控调节的功能,从而能够高灵活性避障及提高在崎岖地形下的工作效率,且跳跃的运动模式在太空等低重力环境下的能量节约效果显著,具有良好的发展前景。此外,本项目设计的机器人体积轻小,能量利用率高,在狭窄、复杂环境中具有良好的适应性,具有良好的续航能力。
本项目需要以仿生为设计总体思路,研究实现高效率、高灵活性跳跃的机器人结构。具体包括以下几个研究目标:
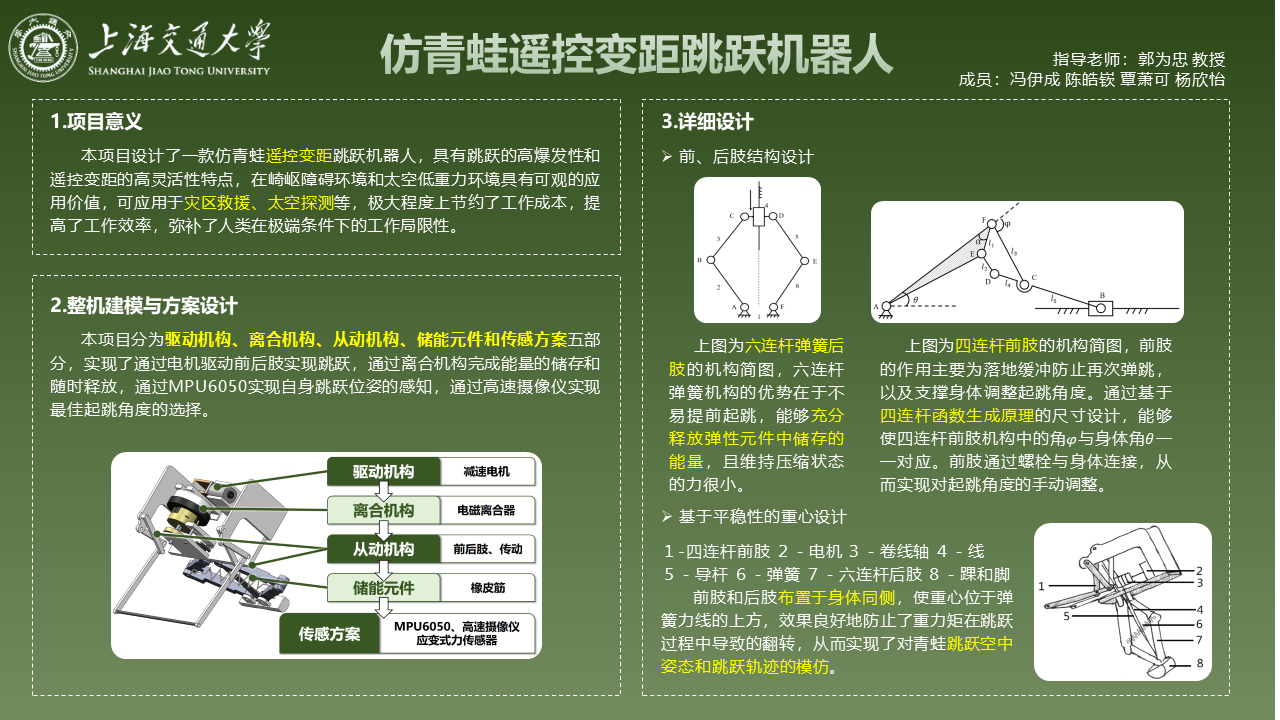
①基于对青蛙跳跃机理的研究,设计并制造一款能实现净输出功率大、起跳姿态平稳的高仿生跳跃机器人;
②使用电磁离合器,实现遥控改变机器人跳跃距离的功能;
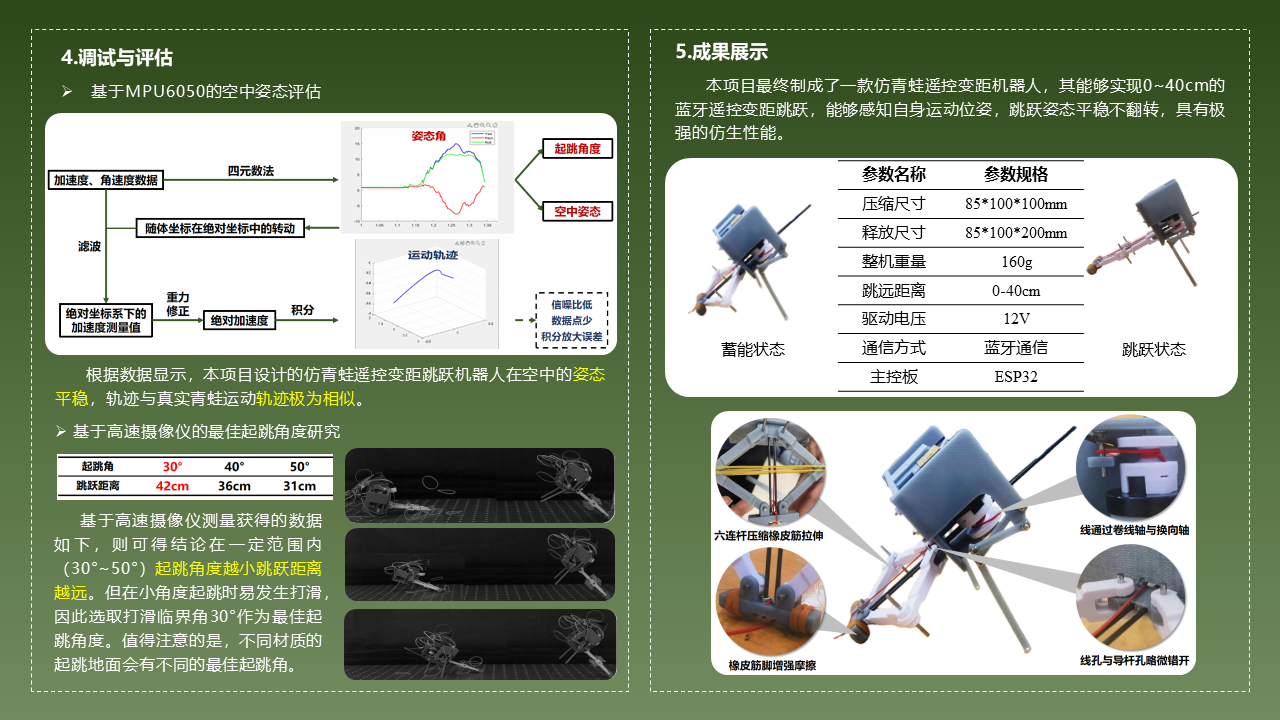
③通过MPU6050、自建静态力测量平台和高速摄像仪,实现对机器人跳跃位姿的智能感知;
④针对仿生性与美观性,完成仿青蛙遥控变距机器人的外观设计。
项目设计了一款仿青蛙跳跃机器人,能够实现0-47cm遥控变距跳跃;跳跃过程中机器人姿态平稳,无明显翻倒现象;机器人整体形态与青蛙非常相似,仿生性强;通过MPU6050、自建静态力测量平台和高速摄像仪实现对机器人跳跃位姿的智能感知,并辅助机器人的设计和调试。
