
仿生跳跃是当下仿生机器人领域的热门话题,然而其机构的精巧性和控制的复杂性是所有研究者面对的难题。本项目立足于机械设计创新大赛,旨在制造一个外观形似青蛙、能实现自主跳跃、姿态调整的跳跃机器人。在降低成本的同时最大化实现跳跃距离指标。同时对机器人保留较高的可塑性和再设计空间,使其功能能够适应实际应用比如侦查、救援等场景。
1. 开发一个具有明显青蛙外形的跳跃机器人,在尽量满足机械设计创新大赛尺寸要求的前提下跳跃尽量远的距离。
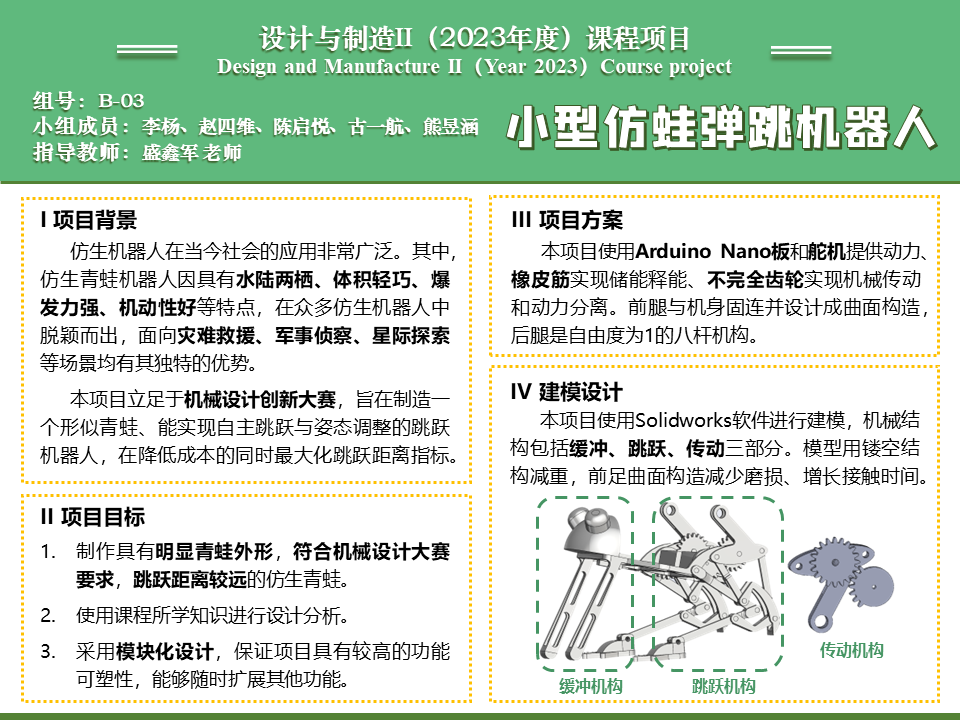
2. 使用《设计与制造II》中所学知识,如凸轮、齿轮、螺纹传动等进行设计分析,并分析优劣、明确应用场景。
3. 通过测试探究最佳弹射距离的相关参数,探究弹簧、皮筋、扭簧、不完全齿轮、棘轮等储能结构的优缺点,通过舵机选型、电机选型、驱动板选型明确其各自的功能和应用场景,满足课程“自主设计复杂机电系统”的客观要求。
4. 采用模块化设计,保证弹跳机器人具有较高的功能可塑性,能够在满足不同需求时进行再设计,能随时扩展其他功能。
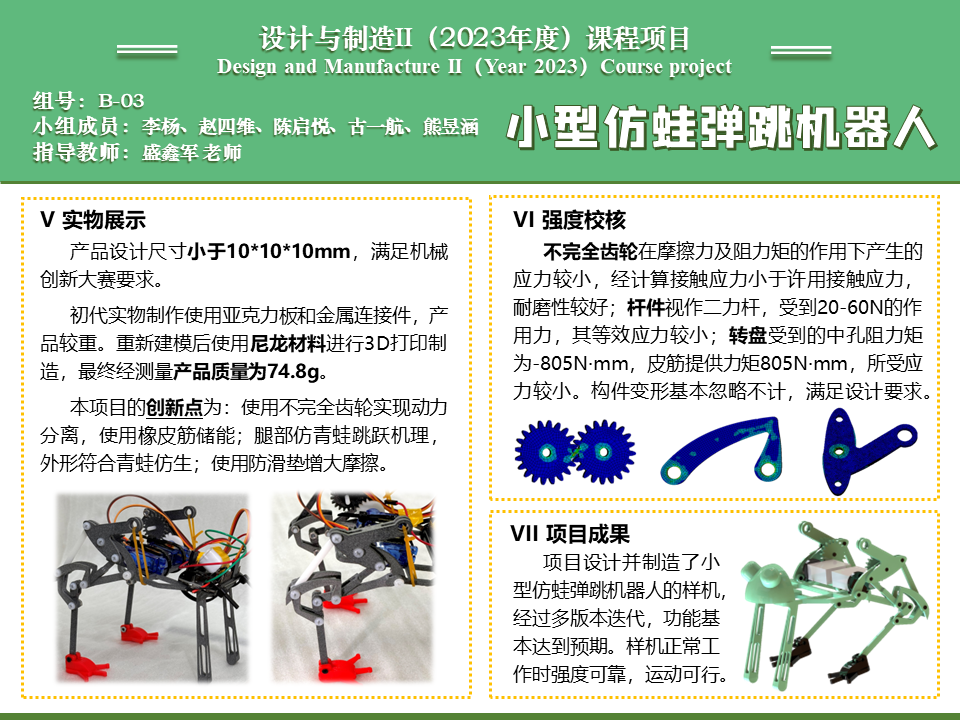
项目设计并且制造了小型仿蛙弹跳机器人的样机,经过多版本迭代,功能基本达到预期。项目通过人工计算、仿真分析等方式对关键构件进行了强度校核,确定样机正常工作时强度可靠;对整机进行了运动学分析,确定运动可行。样机采用模块化设计,各个模块相互组合,保证样机可塑性高,可以根据功能可对其进行再设计。项目同时调研现有同类产品的情况,主要关注点对标比赛要求和课程需求,了解了不同腿部机构的运动特点,最终形成项目报告一篇。
