
仿蝴蝶扑翼飞行器是一种具有生物特性的扑翼飞行器。以仿生设计不仅可以提高飞行效率,还能够在有限空间内更为灵活地执行任务。我们采用舵机作为动力源,利用平面四连杆机构驱动翅膀扑翼。翅膀由PET薄膜和碳纤维骨架构成,组成前后翅交叠结构。同时我们采用锥齿轮传递舵机转矩实现仿生蝴蝶腹部抖动功能。
1.模仿蝴蝶的飞行姿态和其独特的生物特性,具有改变飞行方向的能力;
2.延长仿生蝴蝶的飞行距离,并增加其掉头次数;
3.突出利用机械结构设计,以电控辅佐飞行;
4.增加产品的美观性;
5.尽可能控制尺寸大小和电池电压。
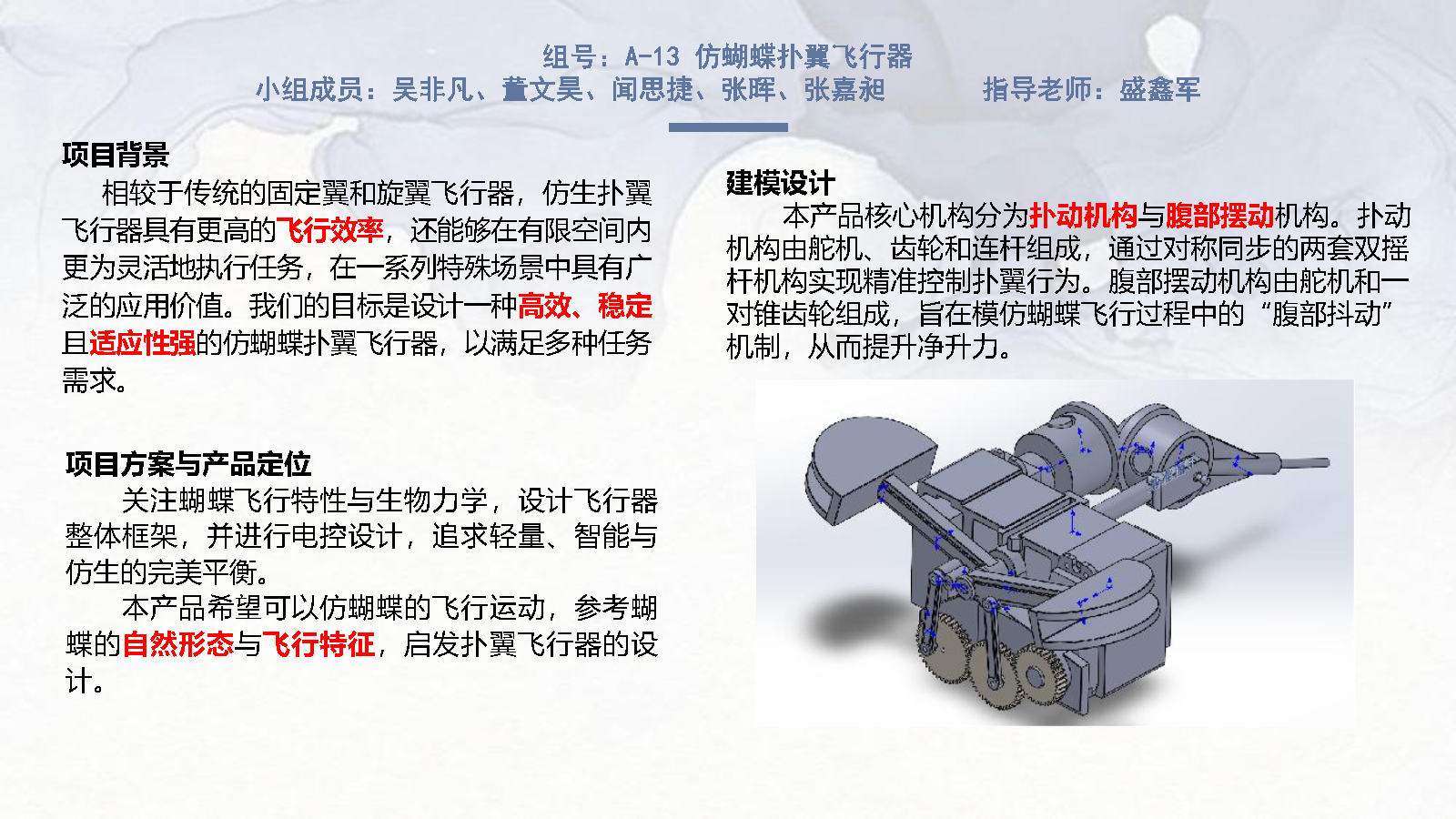
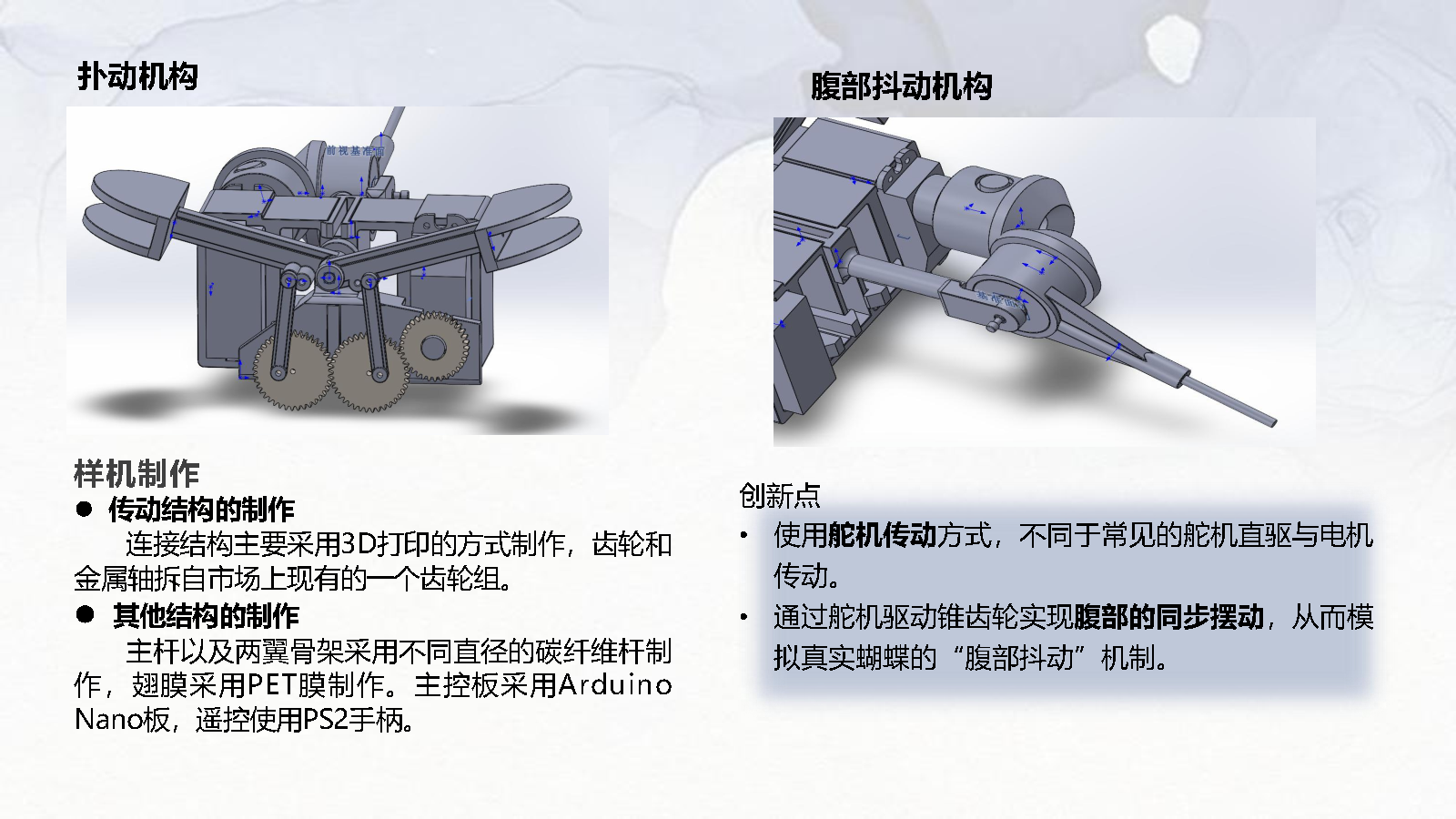
机械结构:通过设计舵机座,使舵机与蝴蝶主杆相连接;设计了平面四连杆传动机构,配合齿轮啮合,使得舵机可以驱动对称同步的两套双摇杆机构使蝴蝶双翼做往复运动;蝴蝶腹部采用了锥齿轮结构,将舵机转动转化方向成为尾杆的摆动,即腹部抖动的仿生功能,提高升力;翅膀采用前后翅交叠结构,可以在下拍时交叠,上拍时分离,从而增大升力。
电控部分:我们采用Arduino平台,将舵机连入Arduino nano板并编程控制其运动;同时我们使用PS2手柄接收器与Arduino相连,以此使用PS2控制器操纵舵机的运动实现遥控飞行。
