

自然界的动物借助跳跃运动能够跨越数倍身体尺寸的障碍物,从而增强其越障能力和环境适应能力。动物跳跃运动模式主要包含以大型动物如袋鼠等采取的连续型跳跃,和各种小型动物如昆虫和青蛙等采取的间歇式跳跃。生物在不断进化的过程中改变自己的身体结构,适应多变的外在环境。借鉴生物的结构特征、生活习性、运动机理以实现多样化的任务需求的仿生型机器人应运而生。
通过分析青蛙的肢体关节结构可以发现,青蛙后肢肌肉发达,骨骼结构清晰,为青蛙的跳跃提供原动力;足部结构大而宽,拥有良好的放摩擦与稳定作用,保证了起跳落地动作的平稳;整体的重心位置与重量分布,为仿生机械的结构设计提供指导。并且可以总结青蛙跳跃过程几个特点:后足作为发力部位,提供跳跃动力;跳跃动作明显具有收缩(能量积蓄)——舒张(能量释放)这一过程;前后脚蹼作为平衡身体的结构率先(最后)与地面接触(脱离)。
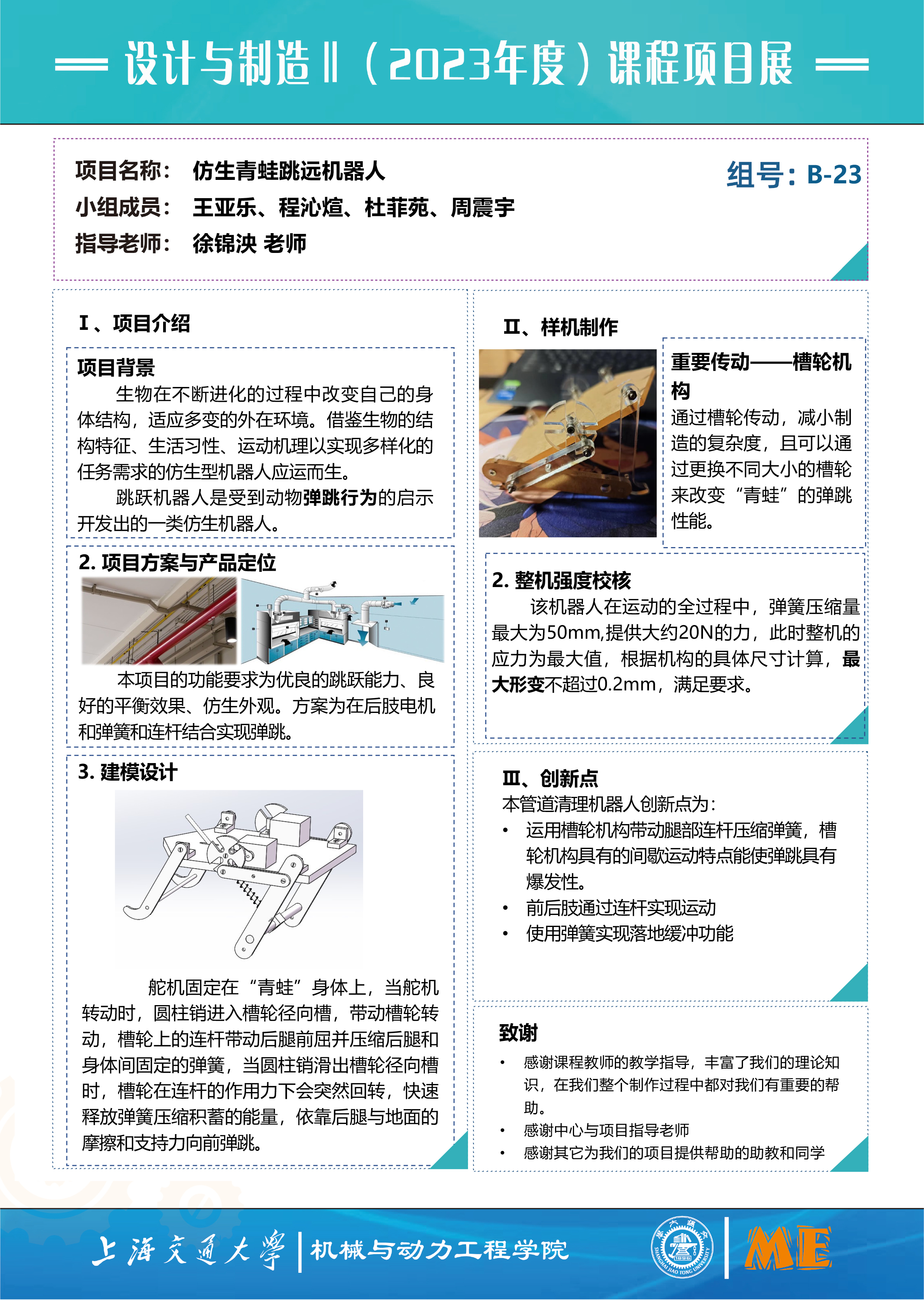
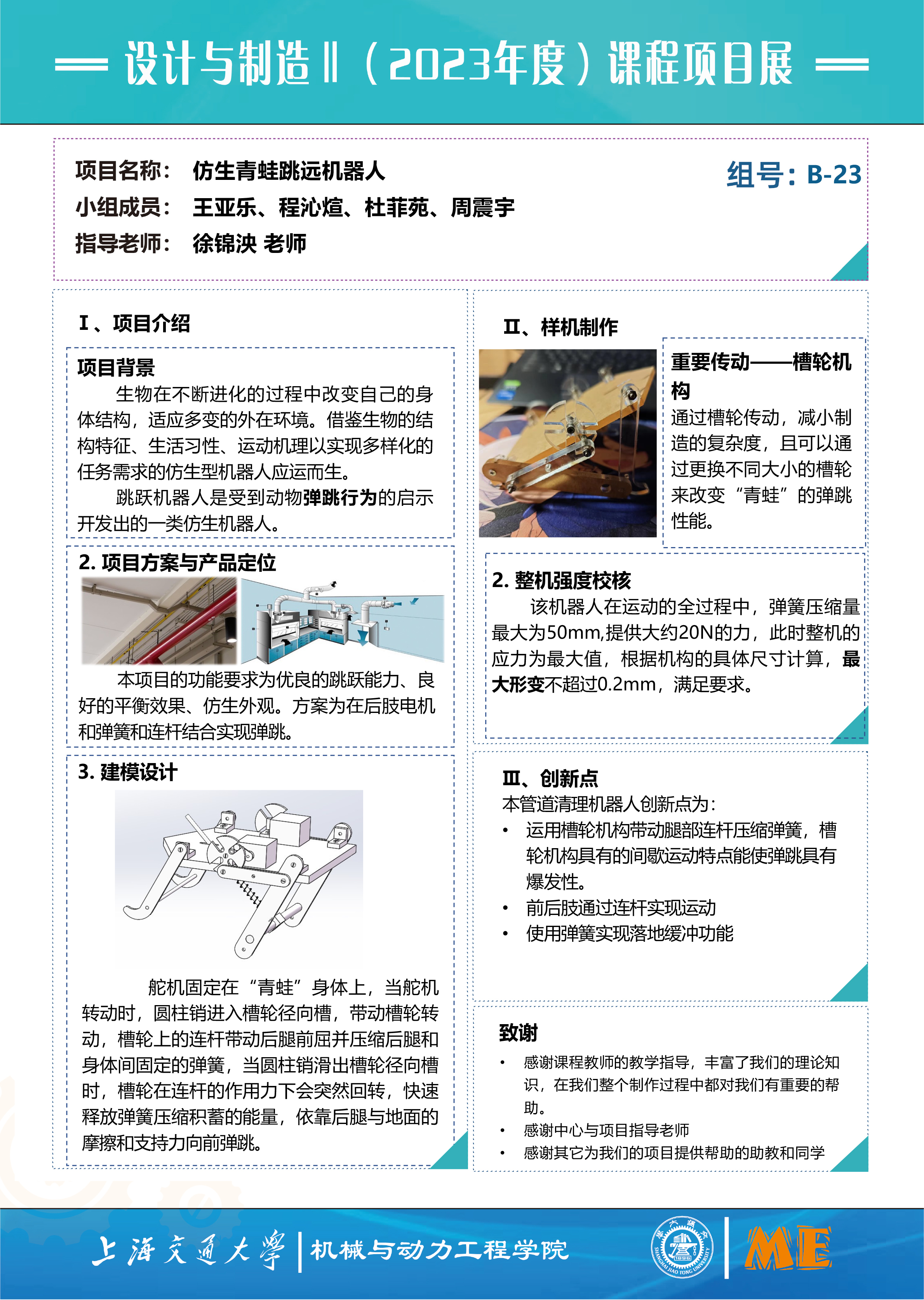
因此我们需要保证仿生青蛙跳远机器人具有以下特征:优良的跳跃能力、良好的平衡效果、机电结构与重量平衡、融合仿生创意的美观设计。
暂无
