

考虑到现如今有些环境对于传统机器人而言是非常复杂和具有挑战性的,例如建筑结构的内部、管道、洞穴系统或其他难以到达的地方。该项目采用仿生技术,模仿毛毛虫的运动独立制作的机器人可以在移动时改变自身形状,穿越非常狭窄的空间,可自适应周围环境。
该项目的整体目标是设计出模仿毛毛虫在运动过程中可改变形状适应环境的机器人。其细节要求如下:
1.改变外部形状:像毛毛虫一样移动时可以改变形状来适应环境
2.环境适应能力强:考虑到适应复杂和具有挑战性的环境,要求
机器人在各种环境下运动具有很高的可靠性。
3.易于装拆,高度模块化:出现损坏可以及时对损坏的零件进行更换,可以随时改变整体的尺寸更好的适应环境。
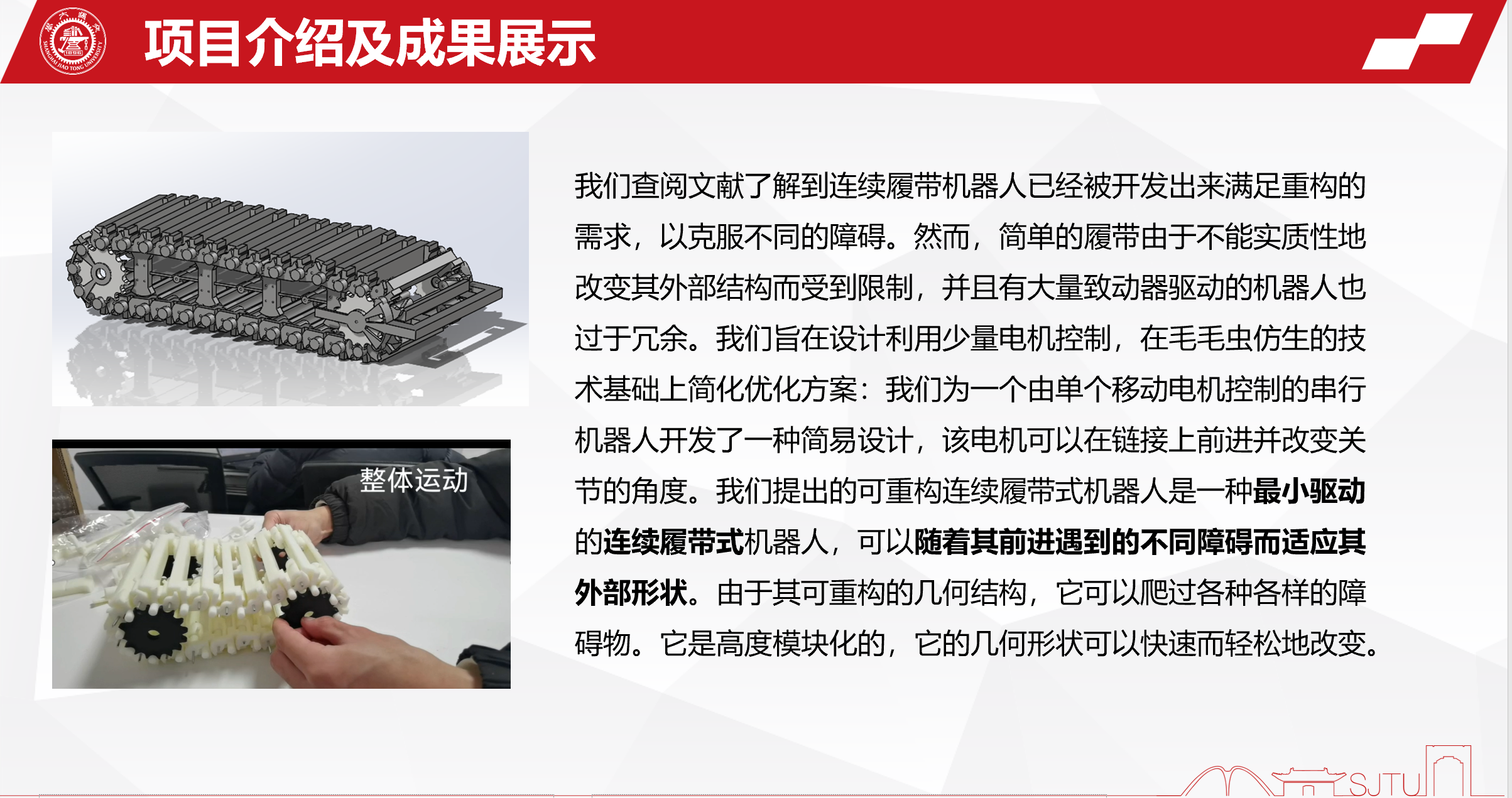
1.设计并完成样机制作:本项目组独立完成了可重构爬行机器人的总体3D建模,且针对对于外部履带模块以及驱动模块进行了相应的材料、零部件选型,实物与模型匹配良好。
2.链轮传动设计成功:本项目通过链轮传动相关知识,根据标准参数选型,成功将设计的齿轮与外部履带配合,能够带动整体履带的传动运行。
