
当前,机器人的使用范围正在不断扩大,需要更灵活、适应性更强的机器人。传统机器人在不平坦地面上表现不佳,因此需要研究更具自主性和跳跃能力的机器人,仿生青蛙机器人成为了一个有潜力的研究方向。而青蛙具有出色的跳跃能力和适应性,跳跃是高效的运动方式。研究青蛙的跳跃机理,设计仿生青蛙机器人对于提高机器人性能和智能水平具有重要意义。
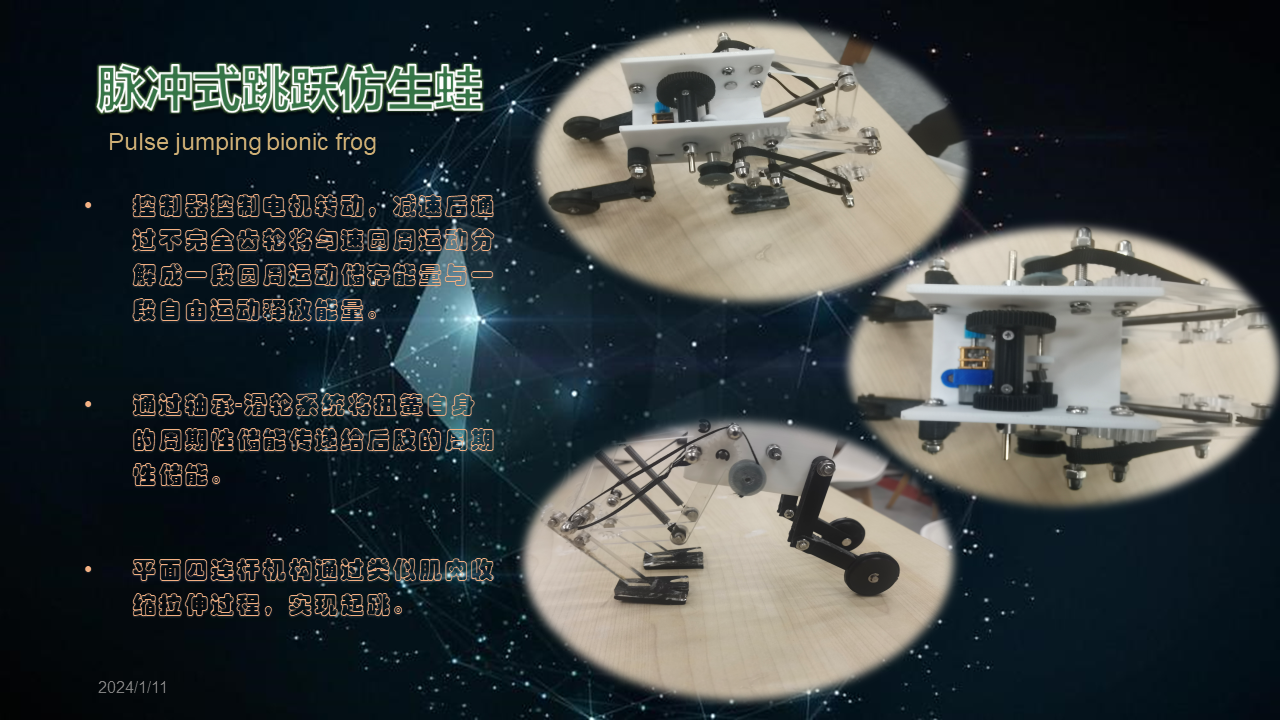
为此,我们决定设计出一种仿生青蛙跳跃机器人,实现一定的特点:1,跳跃性:用弹簧机械储能模拟青蛙弹跳;产品重量重心合理,能够保持稳定的姿态和平衡。2.适应性:能够在着陆时缓冲冲击力,减少对机器人本身和地面的损伤;通过特殊机械结构使得青蛙具有间歇连续跳跃能力。
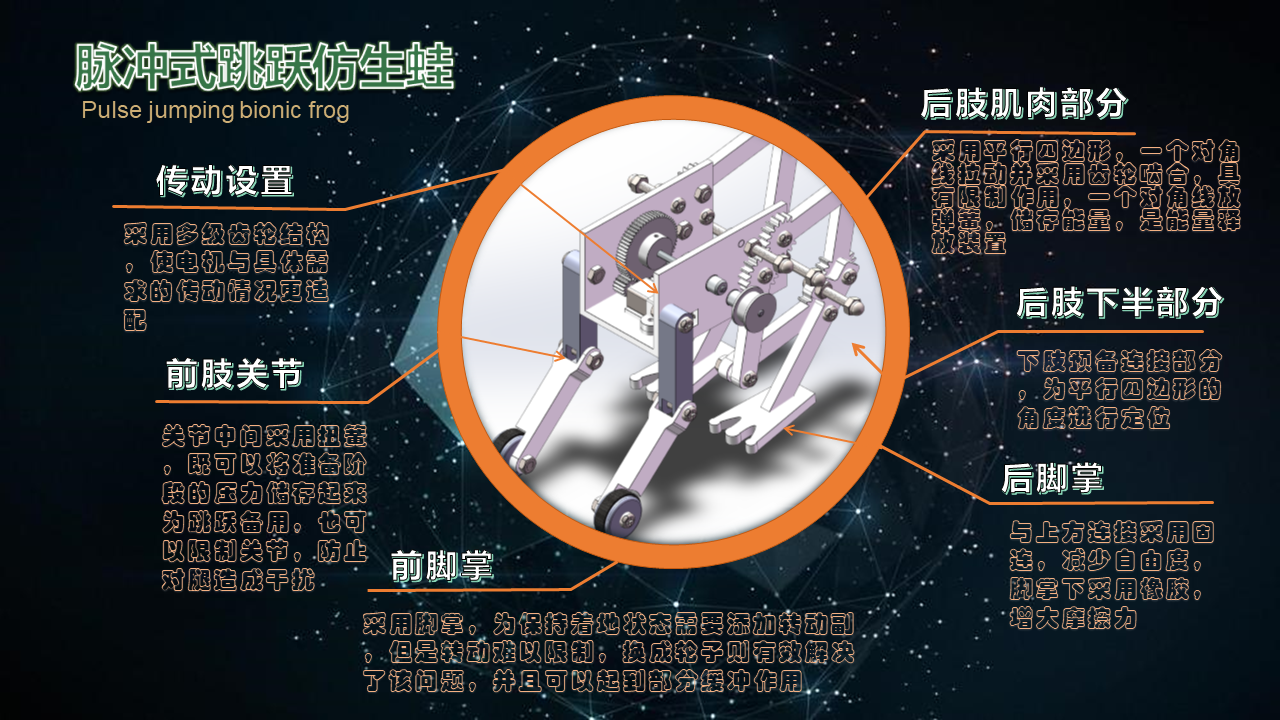
我们经过一定的调研后,最终决定采用平行四边形的后肢机构,其稳定性高,具有力与变形的非线性关系;四杆机构的力的最大值低于线形弹簧力的最大值,降低了对锁定装置及驱动电机的要求;四杆机构力的变化比较缓和,对系统的冲击小等特点十分适合我们的目标。
进而,我们选定了初步方案后,开始进行3D建模,力学分析,运动仿真等验证方案的合理性。完成这些任务后,我们开始实装和试验我们的机构,在此过程中遇到一系列问题,不断迭代我们的机构,最后完成设计。
本次选题的目标是设计并制作一款仿生青蛙机器人,能够在陆地上进行自由跳跃,并具有以下特点:
1.能够模拟青蛙的形态和运动特征,具有较高的仿真度和美观性;
2.能够在跳跃过程中保持稳定的姿态和平衡,避免倾覆或偏离;
3.能够在着陆时缓冲冲击力,减少对机器人本身和地面的损伤;
为了实现上述目标,本次选题需要完成以下任务:
1.调研并分析青蛙的解剖学、生物力学、运动学等相关知识,建立青蛙跳跃的数学模型和控制策略;
2.设计并制作仿生青蛙机器人的结构、驱动、传感、控制等各个部件,选择合适的材料、元件、软件等工具;
3.进行仿生青蛙机器人的组装、调试、测试等工作,评估其性能指标和功能效果;
4.撰写并提交仿生青蛙机器人的设计报告、展示材料等文档。
本组在一学期的实践中,逐步完成了初步方案选型,进行3D建模,购买制作相应零件,组装整机等各项工作,最终完成了仿生青蛙的制作,并使其基本满足一下功能:
1. 能够通过电机驱动其跳跃,且不出现颠覆;
2. 利用不完全齿轮实现连续跳跃;
3. 前肢能够起到一定程度缓冲作用;
4. 后肢跳跃和蹼状脚掌具有一定的仿生性,基本符合青蛙跳跃的机理。
