
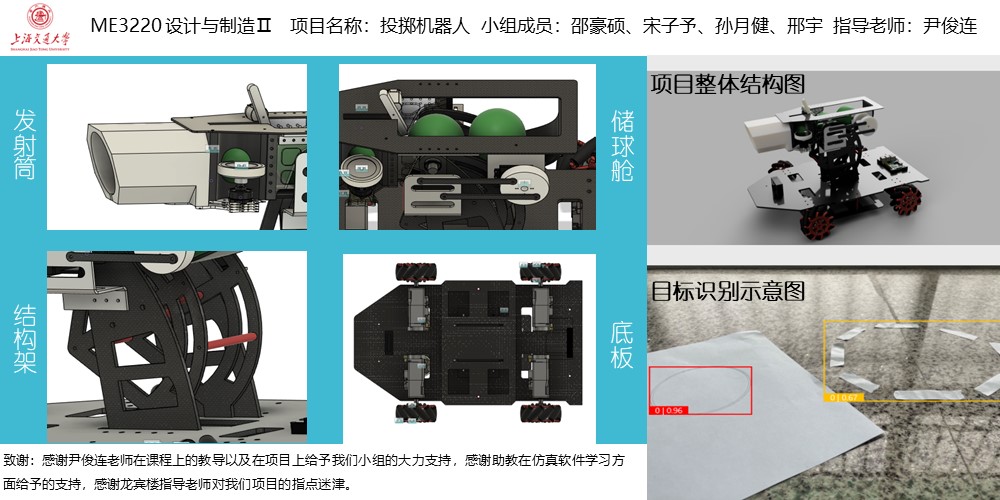
本项目设计的内容,是针对项目展挑战赛的自动瞄准目标投掷机器人。其主要由电控以及机械结构组成。在机械结构上,采用了以摩擦轮作为投掷动力;在电控上,采用了树莓派作为控制中心,起到操控机器人以及瞄准的作用。由于疫情原因,无法做出实物进行比赛。得益于仿真功能的强大,本组进行了模型的构建、电控代码的撰写、机械结构应力的仿真计算以及摩擦轮性能的仿真计算,在能力范围内设计出了一个满足要求、可实现的高性能机器人。
本项目是针对项目展挑战赛之投掷机器人所设计,要求是在预载至少三个网球的前提下,将网球抛投至距离依次加长的指定位置,落点误差不超过2.5 cm。本组目标是设计一个以摩擦轮结构作为主动力系统,辅助移动系统以及自动瞄准系统的机器人。在能够快速、精准完成挑战赛要求的前提下,尽可能地做到轻便、操控易上手。同时,希望设计出来的机器人有较强的普适性、前景性和可改进性,能应用于大多数抛投场景,切实解决人们生活中遇到的一些难题,例如球类发射、水果分类。
本组项目是依据项目目标进行一步一步设计的,最终达成了以下几个成果。1、购买了电源、摩擦轮、电机,了解其参数并进行了一定的摩擦轮使用尝试。2、完成机器人的机械结构设计,进行三维建模、组装。3、完成机器人的电控设计,主要是目标瞄准的代码。4、针对项目展挑战赛的要求,进行机械结构的应力仿真,验证了设计力学方面的可行性。5、进行了摩擦轮发射网球的力学仿真,得到具体的发射曲线。6、撰写了汇报,对项目进行了完整的归纳总结。
