
项目挑战赛:跳跃机器人。
该项目要求跳跃机器人在跳高的场景下实现如下要求:
弹跳高度足够、功能实现可重复,较详细的要求如下:
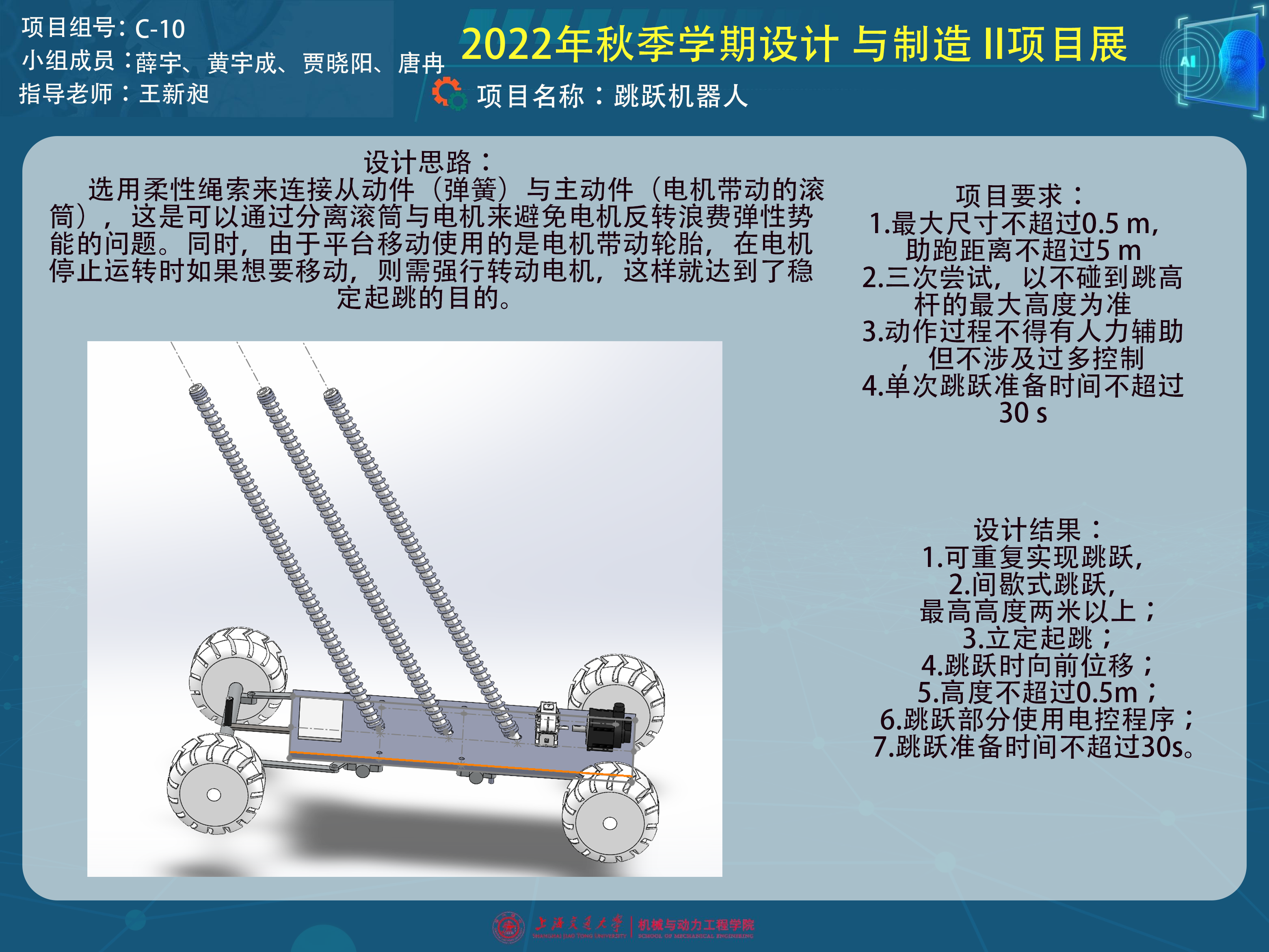
1、最大尺寸不超过0.5 m,助跑距离不超过5 m ;
2、3次尝试,以不碰到跳高杆的最大高度为准 ;
3、动作过程不得有人力辅助,但不涉及过多控制 ;
4、单次跳跃准备时间不超过30 s。
按照跳跃方式划分,当前跳跃机器人具有连续式跳跃机器人与间歇式机器人两大种类。连续式机器人在首次跳跃着地之后的很快时间里,要进行下一次的跳跃。间歇式跳跃机器人的控制技术则要相对简单一些,因为其跳跃过程中的能量补充、姿势纠正以及路线制订等项目,均是在地面静止状态中开展。
由于本项目的跳高背景,设计目标显然是间歇式跳跃机器人。
在经过多种方案的尝试后,本小组选用绳索压缩弹簧、固定角度起跳、车轮带动平台移动作为最终方案。
根据上述项目挑战赛的要求,本小组将最终跳跃机器人的设计目标细化为:
1. 可重复实现跳跃,即在跳跃之后机构完好可重复先前流程;
2. 间歇式跳跃,最高高度在两米以上;
3. 立定起跳;
4. 实现跳跃同时的向前位移;
5. 高度不超过0.5m;
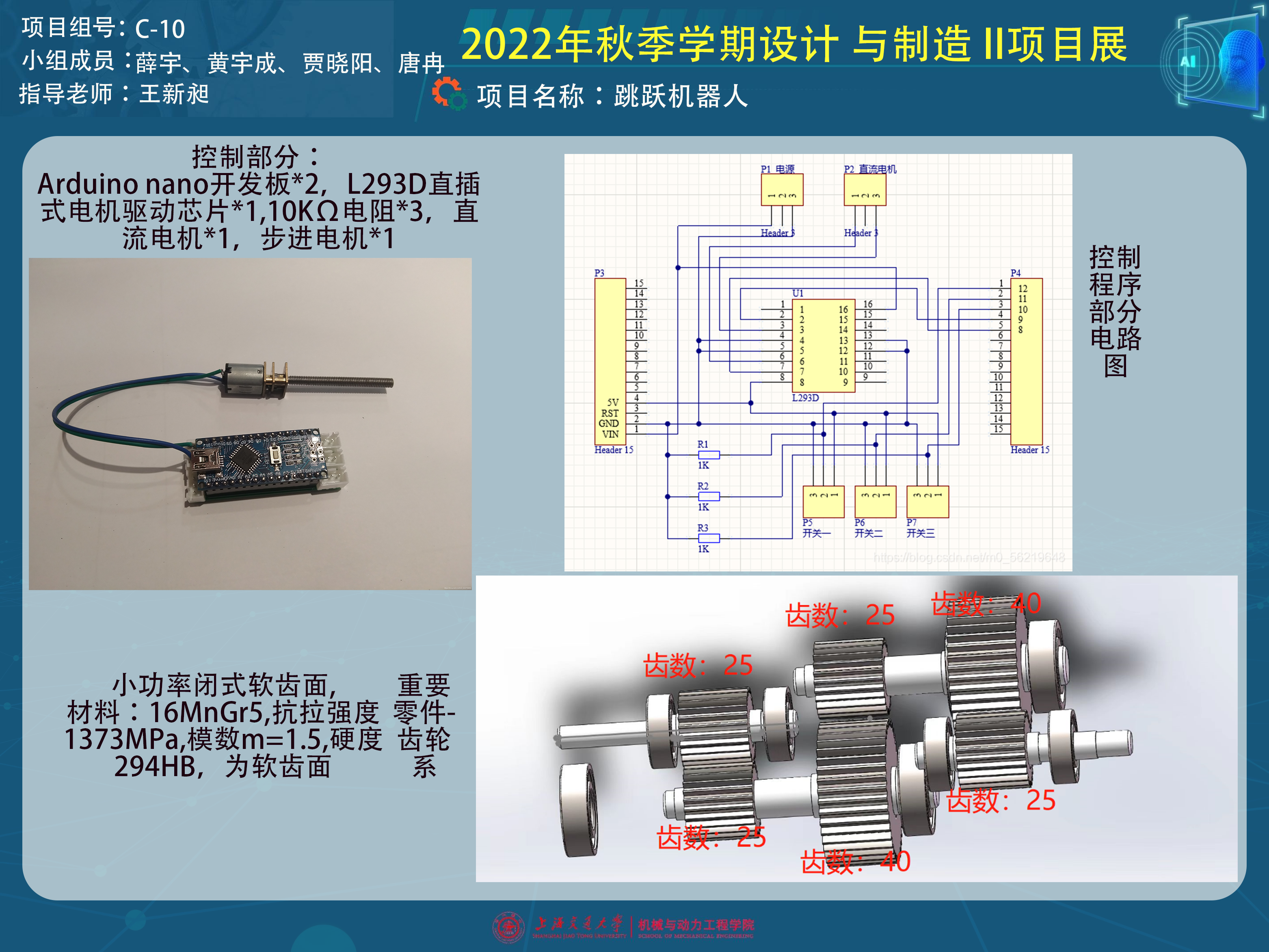
6. 跳跃部分使用电控程序;
7. 跳跃准备时间不超过30s。
本项目选用600r/min的空心轴电机作为原动件,经过传动比为10:1的轮系控制滚筒的转动以达到收线压缩弹簧的目的,在收线完毕后后通过电磁铁的控制使滚筒与轴分离,弹性势能完全释放,经计算,最终理想跳跃高度为2.07m(已克服重力与空气阻力,空气阻力一直按起始的最大值计算),如果将载物平台置换为亚克力板(经有限元分析亚克力板可以满足强度要求,但是碰撞时的情况难以判断),理想跳跃高度可以达到2.52m。
最终理想表现(未替换载物平台)为跳跃准备时间为17-18s,理想跳跃高度为2.07m。
