
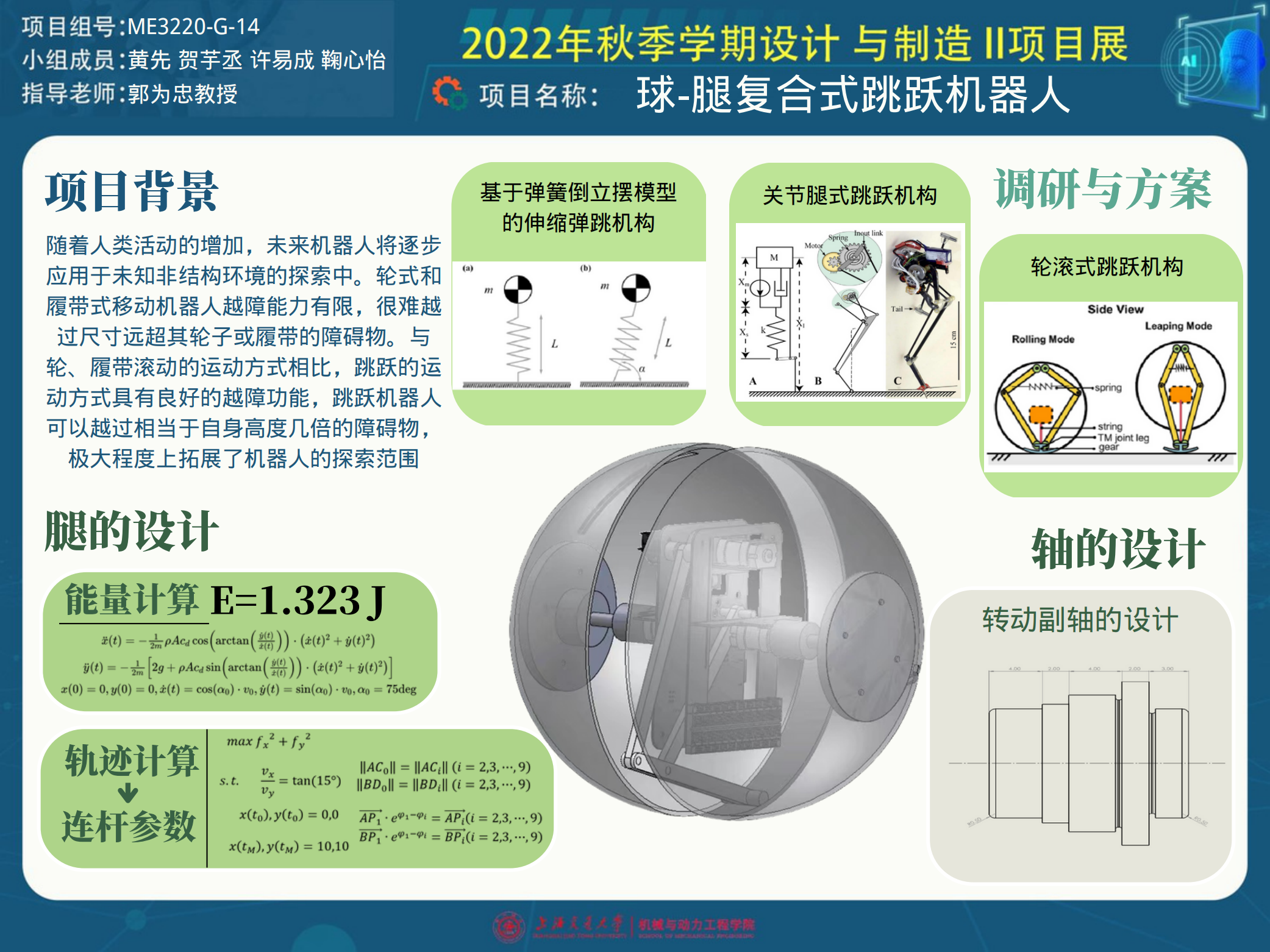
近年来,随着人类不断探索太空,踏足复杂地形,未来机器人也将逐步适应未知非机构环境中。本项目希望设计了一种球-腿复合式的跳跃机器人,球形状态下该机器人可以实现前进、后退、转弯等基本运动模式,能够识别前方障碍物距离以及自身姿态;跳跃形态下腿部对蝗虫进行了仿生,依靠四连杆机构实现轨迹的可优化、可控制性,同时采用减速箱、电磁铁和扭力弹簧实现能量的储存与释放。该机器人结构轻巧,适合应用于多种场合,在跳跃之后由于其球形态可以以任何姿态落地,大大增加了其稳定性。我们将该机器人放入Adams运动仿真软件中对其跳跃以及行进能力进行验证,发现其能够达到并超过我们所定的预期运动效果。
实现基本的运动模式,包括在平地上的前进、后退、转弯等等操作;实现通过距离传感器测量与前方障碍物的距离;实现通过姿态传感器测量自身姿态变化;实现电机、减速箱、四连杆装置以及扭力弹簧的储能,释能过程。实现各个系统的控制与通信。最终希望跳跃时以75°仰角进行起跳,跳跃高度达到1m,姿态检测的误差在1°上下,距离检测的误差在1cm上下。
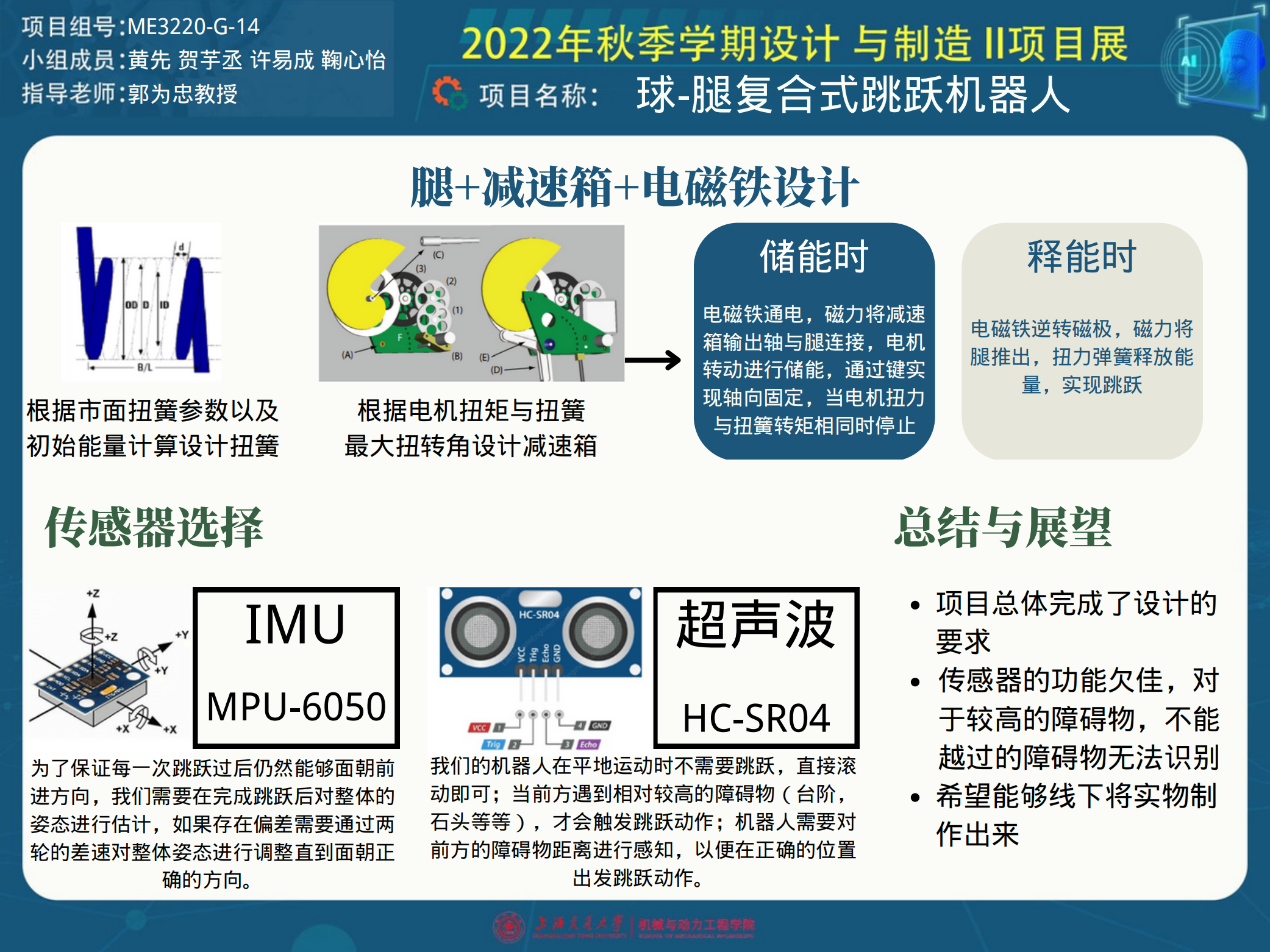
实现了基本的运动模式,包括在平地上的前进、后退、转弯等等操作;实现了通过距离传感器测量与前方障碍物的距离;实现了通过姿态传感器测量自身姿态变化;通过电磁铁与永磁体键的吸附和脱出,实现了电机、减速箱、四连杆装置以及扭力弹簧的储能,释能过程。实现了各个系统的控制与通信。我们实现了跳跃仰角大约在75°,跳跃高度达到了1.2m,超出预期。并且完成了各种障碍物的翻越和攀登。
