
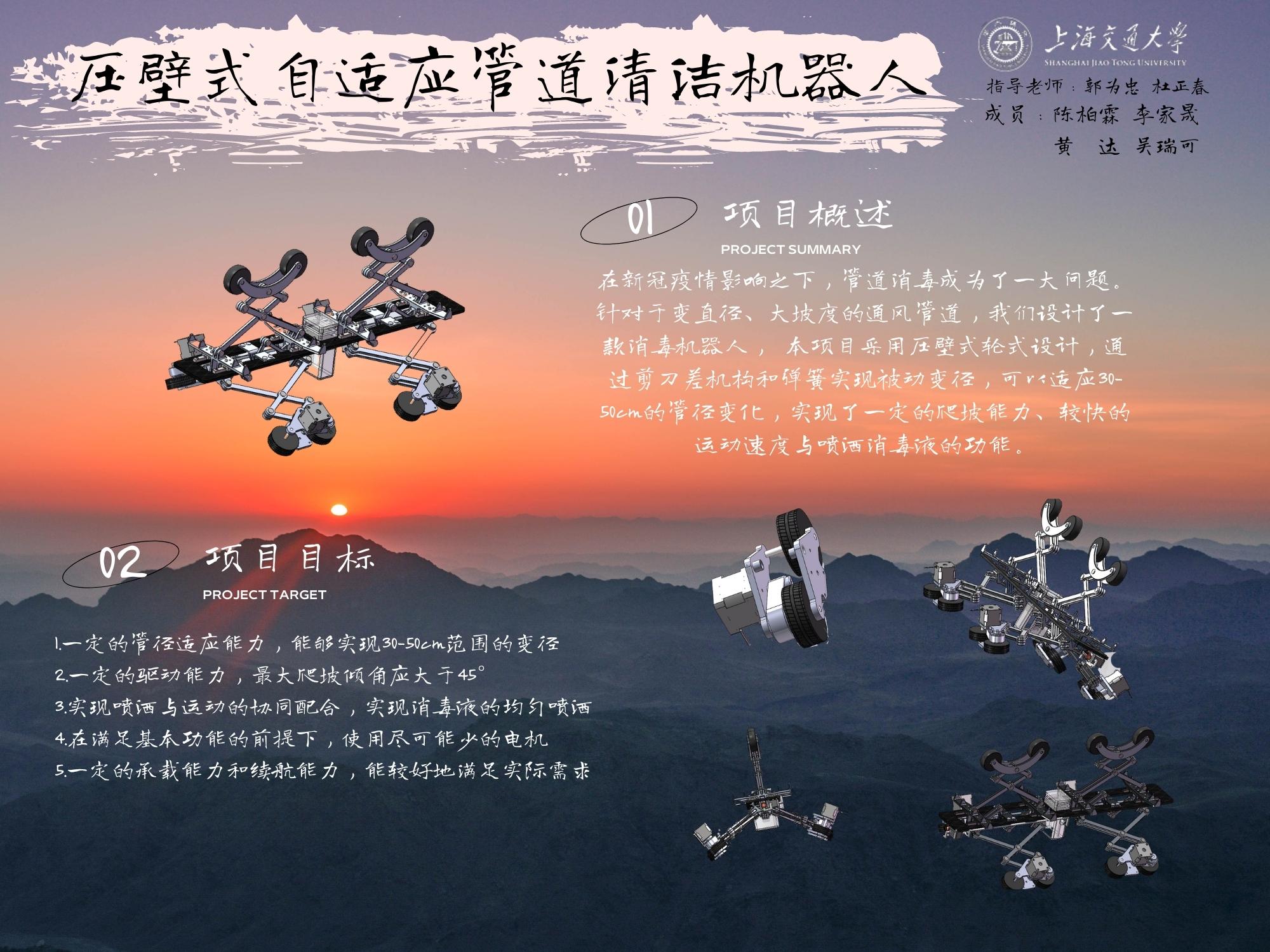
为了防止送风管道内流通的空气促进病毒传播,管道需要进行定期的清理和消毒。然而,人工清洁管道的方式存在较大的困难。因此,本项目拟设计一款管道消毒机器人,该机器人可以适应30-50cm的管径,具有一定的爬坡能力和和较快的运动速度,能够携带消毒液在通风圆管内均匀地喷洒消毒。本项目采用压壁式轮式设计,通过剪刀差机构和弹簧实现被动变径,通过力学分析和动力学仿真对设计方案进行迭代。经检验,最终方案能够满足项目对功能的基本要求。
本项目的管道消毒机器人应该满足如下要求:
1. 具有一定的管径适应能力,能够实现30-50cm范围的变径
2. 具备一定的驱动能力,最大爬坡倾角应大于45°
3. 能够实现喷洒与运动的协同配合,实现消毒液的均匀喷洒
4. 在满足基本功能的前提下,使用尽可能少的电机
5. 具有一定的承载能力和续航能力,能够较好地满足实际的管道清洁需求
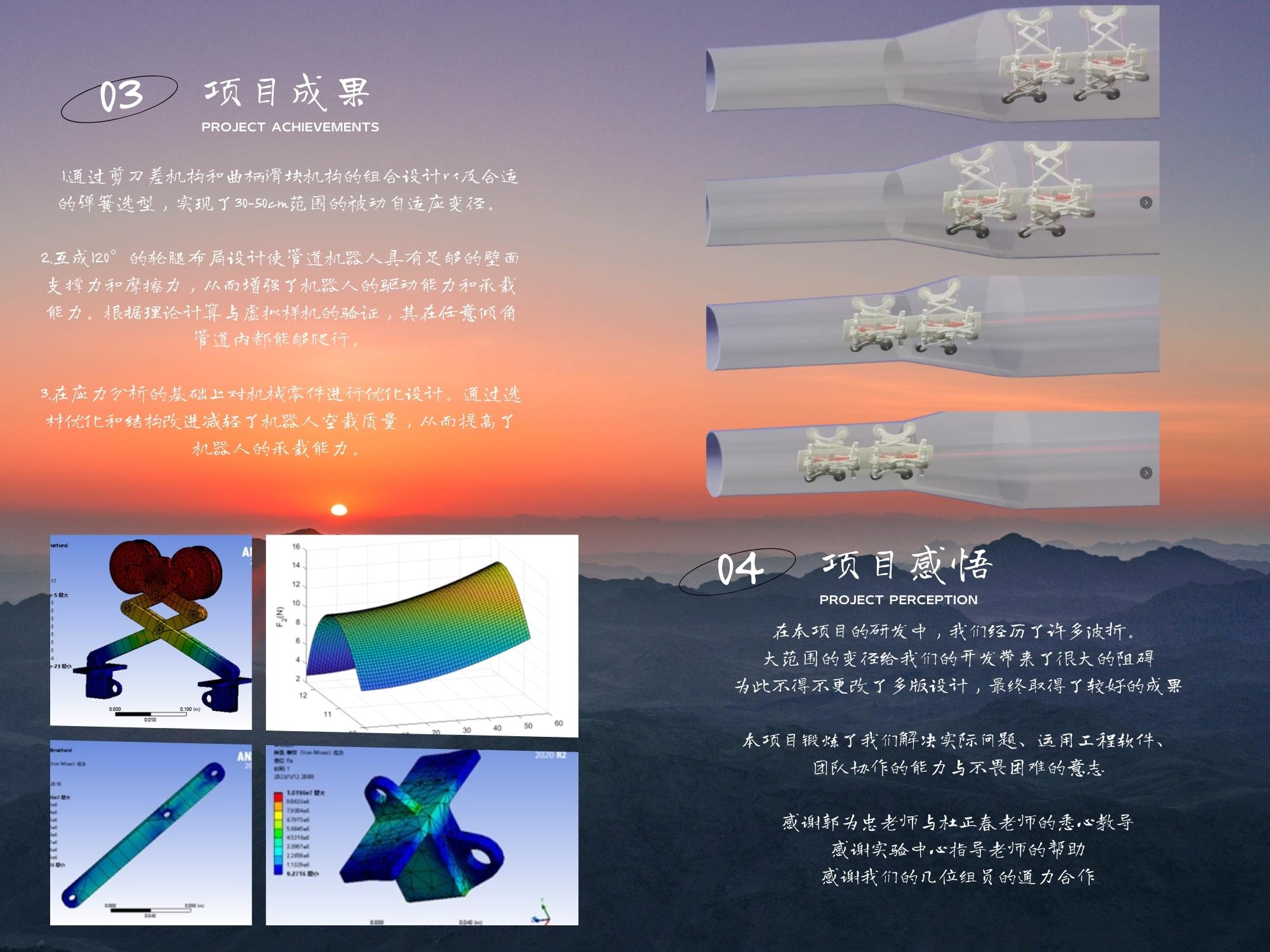
1. 通过剪刀差机构和曲柄滑块机构的组合设计以及合适的弹簧选型,实现了30-50cm范围的被动自适应变径。
2. 互成120°的轮腿布局设计使管道机器人具有足够的壁面支撑力和摩擦力,从而增强了机器人的驱动能力和承载能力。根据理论计算与虚拟样机的验证,其在任意倾角管道内都能够爬行。
3. 在应力分析的基础上对机械零件进行优化设计。通过选材优化和结构改进减轻了机器人空载质量,从而提高了机器人的承载能力。
