

在机器人研究制造领域,跳跃功能一直是机器人运动设计的难点。
2012年,波士顿动力公司在美军快速武装部队的资助下研发打造了sandflea跳跃机器人,该机器人可以带动自身5千克的重量跳起9米左右,成为跳跃机器人中的佼佼者。
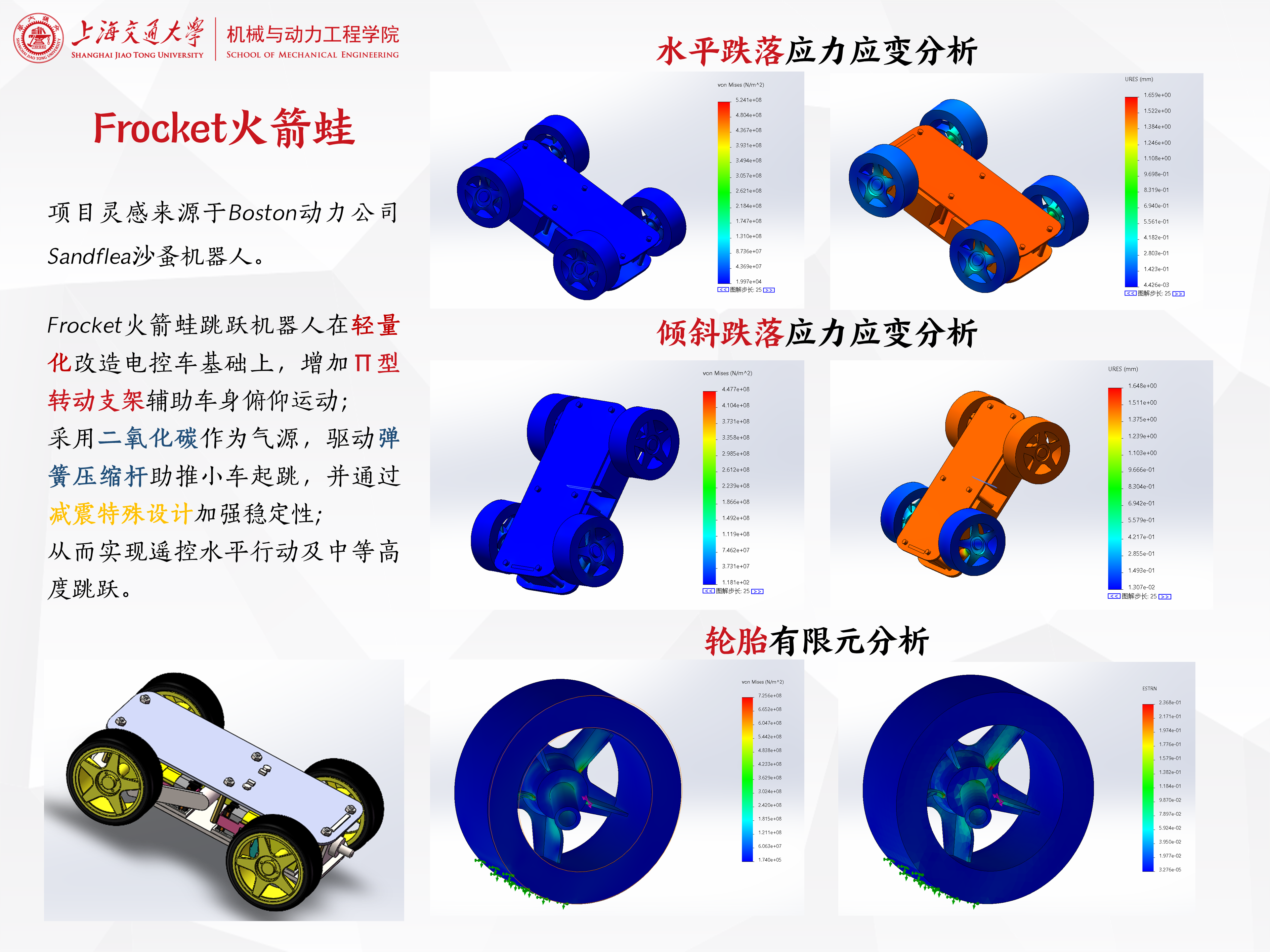
本组在sandflea机器人的运动模型上做出了自主创新和改动,以气动为主要动力源,设计出了一种可以实现遥控水平行动及中等高度跳跃的frocket火箭蛙跳跃机器人。
我们致力于制造一种结构简单,操作方便,跳跃能力出众的跳跃机器人。
针对车身的基础运动,我们希望通过电子系统和机械结构的统一联动控制车身的水平行动及跳跃等基本运动,实现车辆的远程控制和运动调控。
对于跳跃功能,我们则计划通过调节跳跃前车身姿态来控制跳跃方向,在方向确定后利用气动系统实现设备的跳起。
为了保证跳起高度和车身的跌落强度,我们还需要精简车身结构,筛选车用材料,在保证设备抗摔性能的基础上尽可能的减轻设备重量。
设计了π型杆车身姿态调整机构,实现跳跃方向的自主控制,从而使跳跃高度,跳跃距离可以调整,提高跳跃的适应性。
设计了以二氧化碳气源为动力源,电磁阀为主要开关机构,弹簧气缸为作动装置的气动跳跃系统,以气体内能推动气缸行动,再在弹性势能的帮助下实现装置的跳起。在低成本,结构简单,原理简单的基础上实现了中等高度的跳跃功能。
设计了以蓝牙为遥控基础,以单片机为设备基础的遥控装置,单片机连接气动装置电磁阀、车轮电机及π型杆电机,实现了设备的远程遥控。
