
在后疫情时代中,市场对于可以进行高效消杀的自动化机器人有着较大需求,且因送风排风管道中空气的流通循环可能加速病毒传播,市场需要一种可以适应不同管径、具有消毒功能的自动化管道消毒机器人。因此,我们计划设计一款管道机器人,一方面能够在不同管径的管道内实现快速前行、上行等运动的,另一方面可以对不同管径的管道进行均匀有效的消毒,可以大范围适用于写字楼、酒店、商场等人流密集区域的管道消毒工作,对其排风送风系统进行全面消毒,防止病毒病菌的进一步扩散与传播。
首先,管道机器人需要具备行进功能,能够以较快的速度在管道内进行前进、上行等运动。其次,管道机器人需要具备适应功能,能够实现由小径到大径的变径和由大径向小径的变径,从而实现机器人在不同管径的管道内的运动。此外,管道机器人还需要具备消毒功能,能够承载消毒液,并且能够通过雾化喷头实现管道内的均匀喷洒。最后,管道机器人还需要具备控制功能,我们希望能够通过WIFI模块实现对前进模块中电机的转动状态、变径模块中电机的转动状态、以及喷洒模块的工作状态进行控制。在满足了以上功能后,管道机器人能够实现在不同管径的管道中进行快速、有效、均匀的消毒。
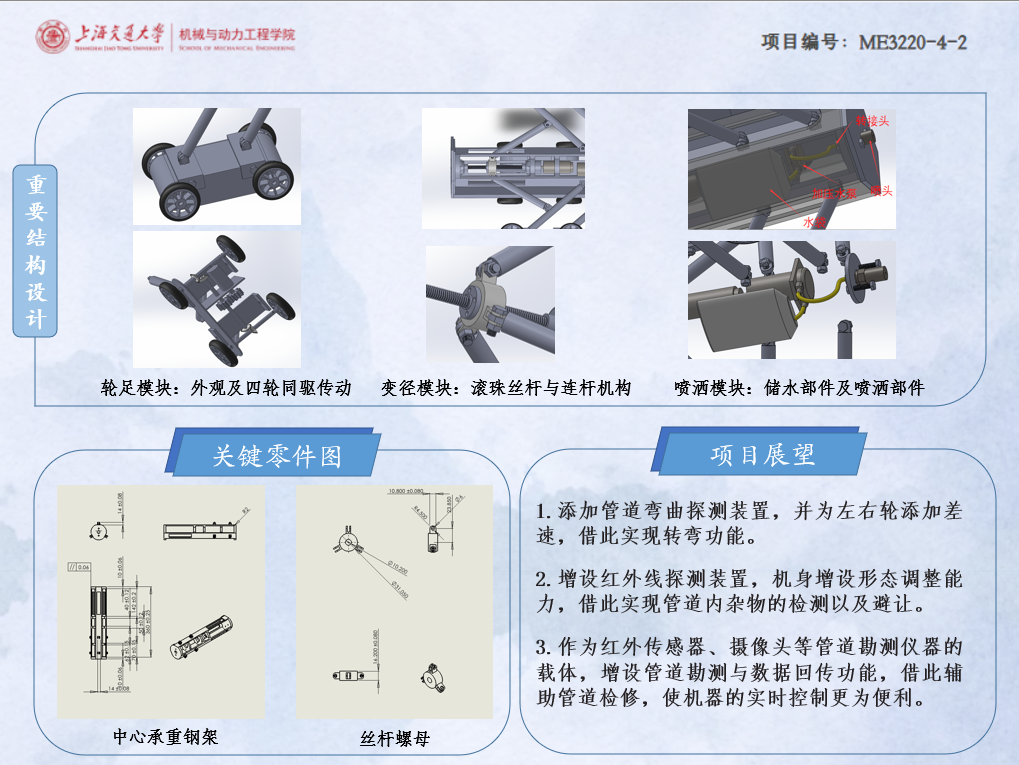
最终产品设计中,我们将管道机器人根据功能划分为轮足子模块、丝杆滑块子模块和喷洒子模块。轮足子模块为机器人整体的前进提供动力,同时利用连杆部分实现机器人与管壁之间的支撑。丝杆滑块子模块通过电机带动丝杠转动,控制轮足子模块的撑开和缩小,从而实现变径功能。喷洒子模块实现液体封装,以及管道内的消毒液喷洒。我们通过受力分析以及功率计算等步骤,合理规划车身大小及内部空间,正确选取零部件和连接方式,对材料进行强度校核,为最终产品设计和装配环节提供了充足的理论数据支持。我们通过ADAMS仿真分析我们所设计的管道机器人的实际工作情况,仿真结果也较好地符合了预期。
