
随着工业4.0时代的到来,机器人在社会的各个领域得到了越来越广泛的应用。而投掷机器人,作为各大机器人赛事常见的选题,集技术性与娱乐性于一体。单是把球投出去并不难,但要能把球投得又快又准,除了电控部分,对机械结构的灵活性与精确性也有着很高的要求。投掷机器人具有重要的研究意义,不仅可以用于流水线生产,还可以用于辅助运动员训练。因此我们小组决定自行设计与制造一种投掷机器人,能够实现精确投中目标的功能。
本项目主要有以下三个实现目标。(1)能够精准命中目标。根据投掷目标的距离,计算出合适的发射参数,将系统调整至合适的发射方向以及选择合适的发射速度,以达到能精确投中目标的效果;(2)能够自由选择发射位置。投掷机器人底部安装移动装置,使系统可以整体移动,从而自由选择发球位置;(3)可以自动补球。发射轨道上方添加球匣,在前一颗球发射后能自动将下一颗球送入发射装置,可以做到连续发射。
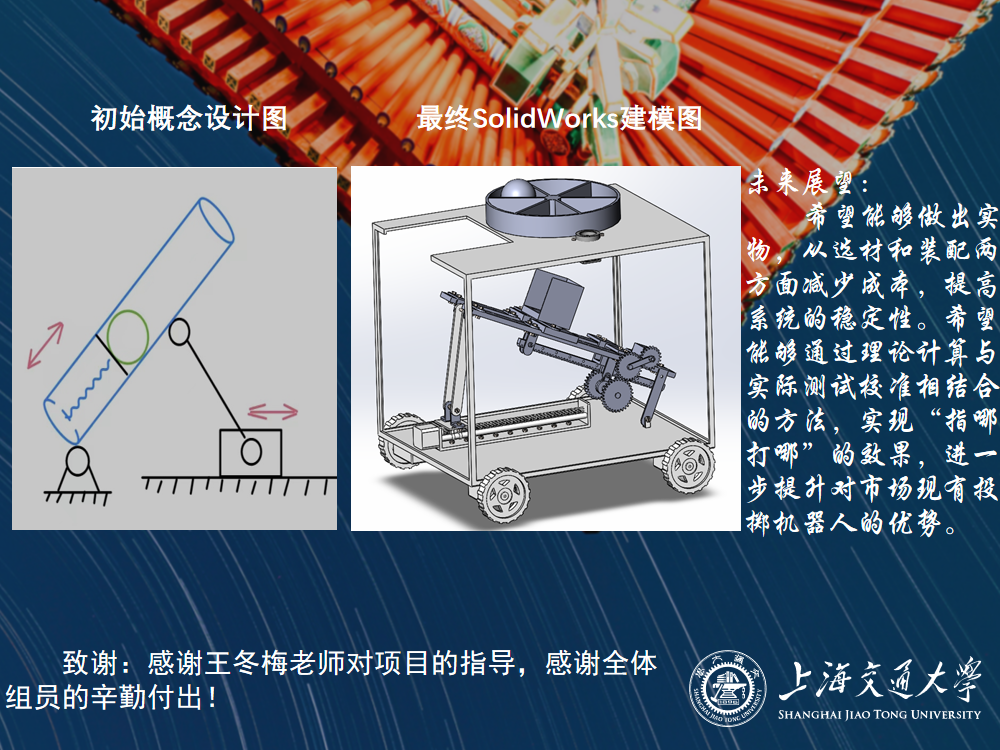
我们小组成功完成了投掷机器人的设计并实现预期功能。虽然由于疫情原因未能制作样机,但我们通过理论计算与仿真,确定能够实现精确投掷目标。我们给导轨添加了丝杆滑块机构,可以调节发射仰角。此外我们将整个发射装置置于一辆小车上,使得整个发射机构可以朝任意方向发射。小车上装有图像识别系统,能够识别投掷目标,并自动调整发射方向和发射仰角。在机构的上方添加了输球盘,发球后以摩擦轮驱动输球盘,成功实现自动补球效果。总的来说,我们小组基本实现了项目预期功能。
