
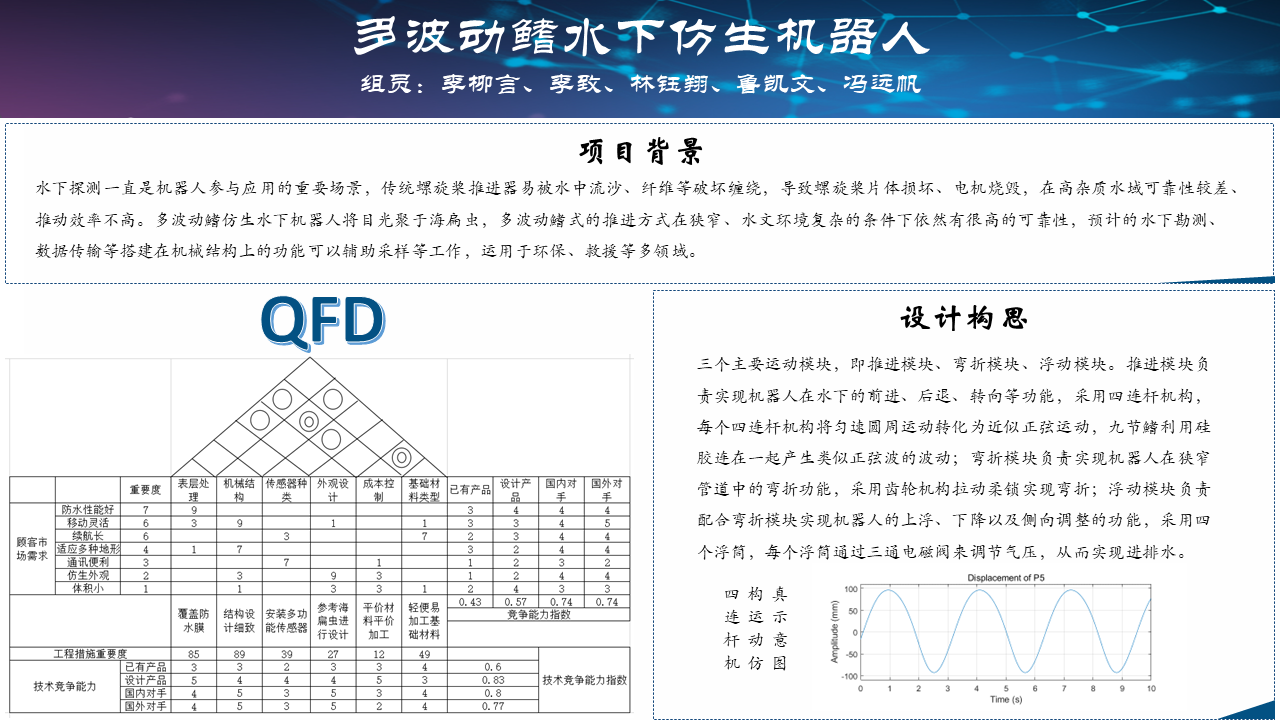
本项目拟根据海扁虫的运动特点,建立海扁虫柔性长鳍的运动方程,并模仿海扁虫的胸鳍波动推进运动建立结构模型,运用计算机模拟仿真测试结构设计的可行性并进行结构设计的迭代,制作样机验证海扁虫采用 MPF 推进模式的相关理论研究结论。样机应能够实现前进、后退、转弯等运动,并且具有良好机动性、游动扰动小、高效率等优点。样机安装有水下摄像头等传感器,实现水下隐蔽探测功能。
机器人采用多波动鳍设计,可以在水下以约0.3m/s的速度运动,可以实现前进、后退、转弯等运动。在遇到狭窄环境中,机器人可以上下弯折,每节可以实现约-5°至5°均匀弯折。机器人可以承受10m水深,可以实现六个自由度的上浮和下潜运动,垂直运动速度约为0.2m/s。机器人可以通过摄像头、水温传感器、水深传感器等实现水下探测的功能。为减轻机器人质量及增加机器人可靠性,整个机器人采用的舵机数量总数应少于4个。
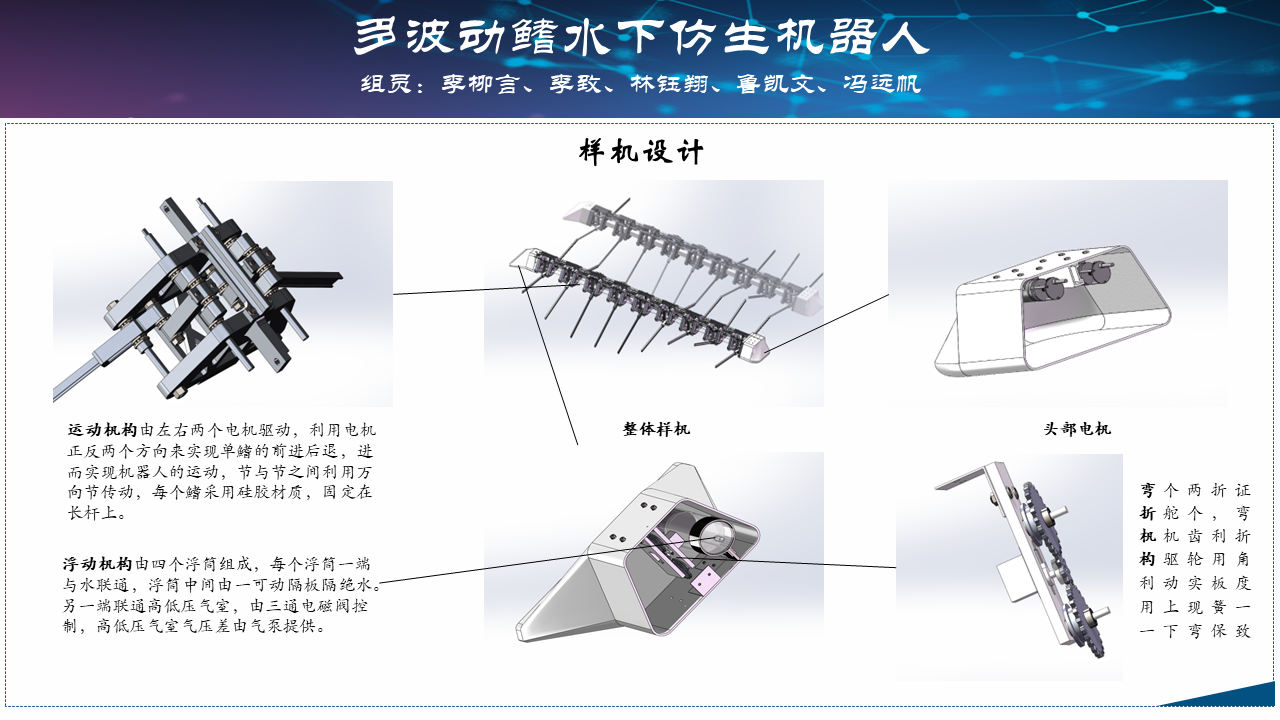
1、通过文献调研,建立了海扁虫运动模型,建立了海扁虫运动方程,并模仿海扁虫运动,进行了多波动鳍机器人的概念设计,确定了实现各功能的机械结构,并建立模型。
2、对样机进行了动力学仿真,确定了机器人各部分的尺寸结构,对整个样机进行详细的机械设计,并对各零件进行强度校核,建立机器人详细设计结构模型,利用Solidworks验证设计可行性。
3、对于控制与传感器进行了设计。通过市场调研确定了电机、舵机、传感器等零部件尺寸。
