

跳跳豚是一款利用4片碳纤维,6根橡皮筋蓄能可重复跳跃的侦察机器。头部集成电池,电控,电机,侦测,控制机构,身体由碳纤维和橡皮筋组成为类球形机构,底部是支撑机构,由于外表和运动形态类似河豚变大变小,名为“跳跳豚”。
该机器通过力学和运动结构优化,理论上拥有极高的跳跃性能。在30秒内通过完成长时间蓄力,机器立起,调整方向,机构释放,起跳,坠落等动作行为可实现垂直跳跃至少1.5m高度的设计指标。
跳跃机器相较于其他地效机器有着极高的越障能力,在军事侦察,行星探索方面有着较高的应用价值,此外还可以在玩具市场有所建树。对类似机械结构的研究也有着铺垫发展的意义
(全机未蓄力状态尺寸规格在40cm*10*cm*10cm以内,蓄力状态尺寸规格在25cm*30cm*300cm以内。)
跳跳豚项目设计目标主要对象是项目挑战赛,主要性能指标是跳跃高度。
项目设计必要目标:
(1)始末长宽高尺寸大小0.5m以内。
(2)跳跃过程有确定的方向偏差。
(3)单次蓄能在30s以内。
(4)单次跳跃1.5m以上。
项目目设计进阶目标:
(1)单次跳跃5m以上。
(2)落地后可再次蓄能调整姿态。
(3)可自行调整跳跃大致方向。
项目设计发展目标:
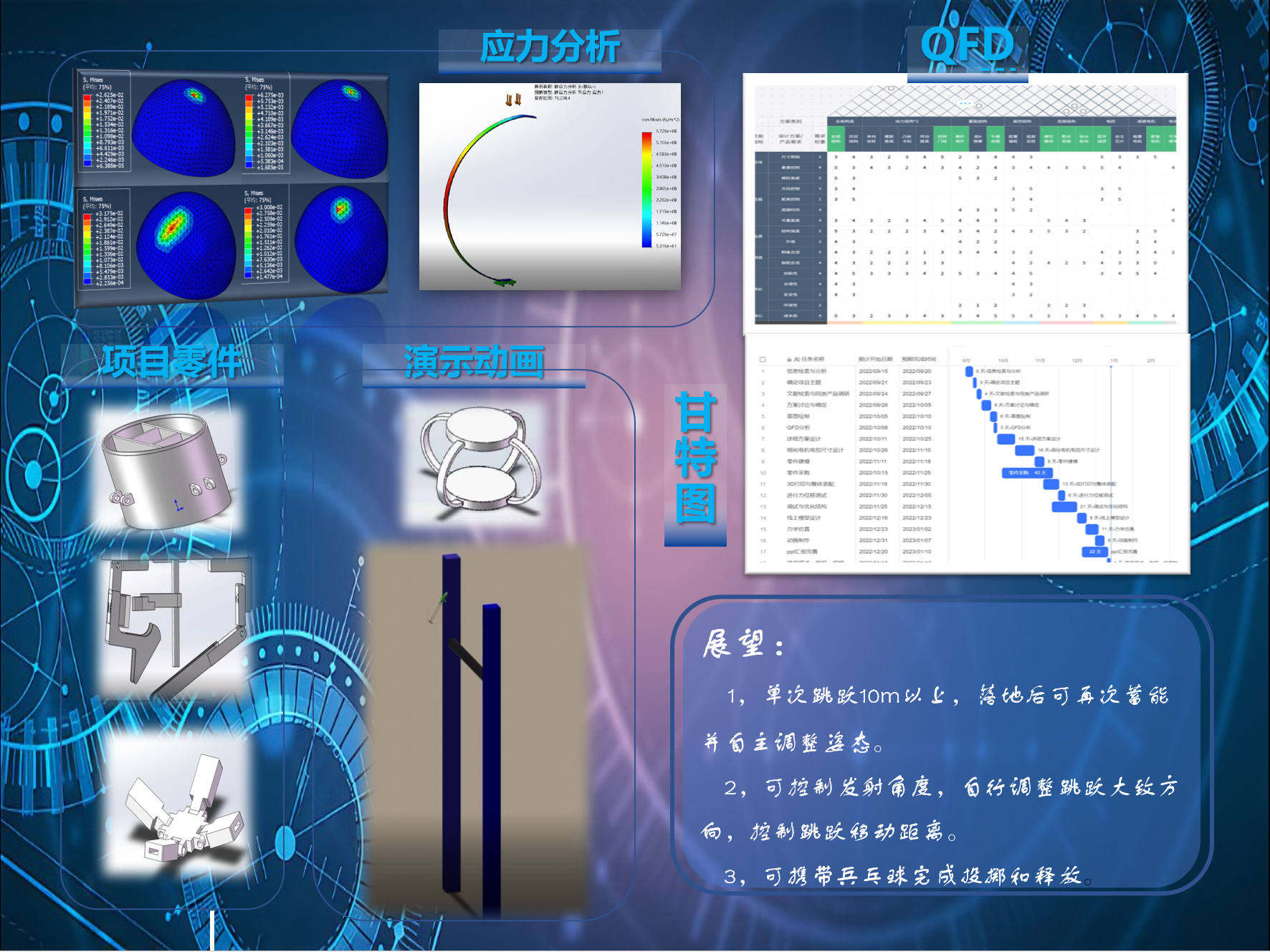
(1) 单次跳跃10m以上。
(2) 可控制发射角度。
(3) 可控制跳跃移动距离。
(4) 可携带兵乓球完成投掷和释放。
项目执行期间全组成员以极高热情投入,在李祥老师,方进晖助教,前人研究的帮助下,取得了一系列有效的实践和建模仿真成果。
1, 理论实践成果:
(1)弹性片受力公式推导

(2)弹性片受力理论曲线和应力分析


(3)组合式蓄能优势分析-(参考文献)

(4)实践测试力位移曲线

(5)头壳落地应力分析

(6)系统数据核算设计

(7)运动分析

2, 建模仿真成果:
(1)第一版设计建模


(2)最终建模零件


(3) 组装建模展示

(4) 门栓结构动画演示
![]()

(5) 蓄能动画演示

(6) 越障动画演示

3, 实物制造成果:
(1) 采购物资核算设计


(2) 实物制作迭代


(3) 实物运动演示

(4) QFD质量展开


项目执行过程中全组成员经历了激烈的思辨,反复迭代和测试,在制作实物的过程中也遇到了很多困难和坎坷,但大家齐心协力,立足于理论基础,全方面提升了设计,建模,仿真,3d打印,采购,制作的能力。
但是,过程中也存在许多不完美在激励着大家不断进步改善。
最后由于疫情而没有完成产品的实物最终形态,也是大家的遗憾所在,不过做到理论上心有成竹,在以后的学习生活中依然有机会完成最终的制作。
