
跳跃机器人被归纳为陆地机器人,由于其可以进行跳跃,因此在躲避障碍物以及跨越沟壑方面的通过性要更加强一些。因此,跳跃机器人在军事和国防、工程调查和勘察、反恐领域、星际探索、救援和灾害救援及其他领域都有着非常突出的优势与广阔的前景。本次项目也同时应挑战赛要求,在满足最大尺寸,助跑距离要求以跳高为最终挑战目标,在保证高度后对跳跃的稳定性,姿态控制以及连续跳跃功能做进一步设计。
1、实现跳跃的功能,且经计算后暂定跳跃高度能达到0.5m。
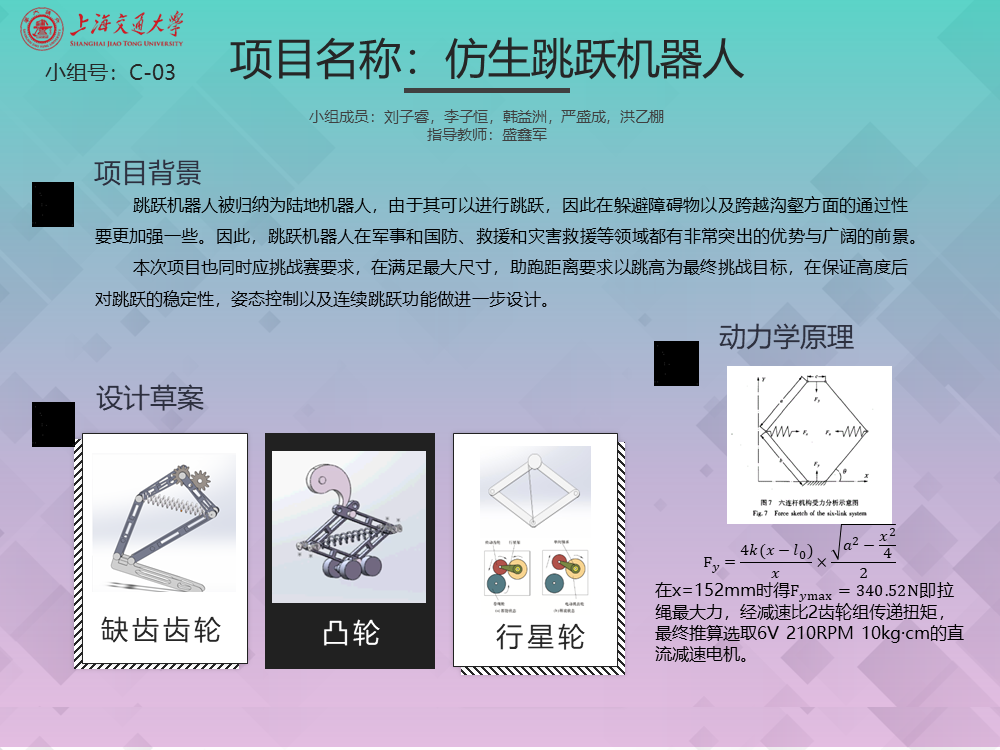
2、解决跳跃时能量释放的问题,但现有大多数方案如不完全齿轮,凸轮等机构等,需要考虑零件制作难度以及预计成本对项目设计不适用,需要设计零件结构不复杂且体现机械性的释放机构。
3、建立数模并进行仿真,做出跳跃整体过程的动画,并对运动轨迹进行分析,如跳跃过程中质心的轨迹曲线,弹簧蓄能阶段对地面的作用力,绳的拉力与电机提供扭矩是否适配的问题等。
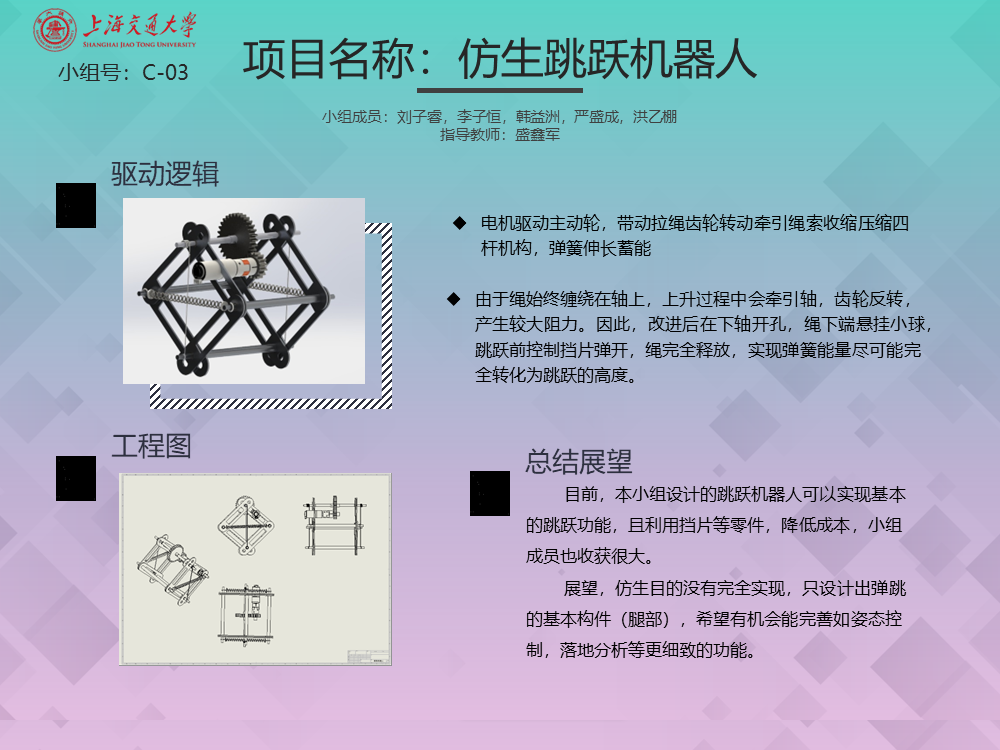
项目重点着眼于对腿部结构进行设计,在综合各设计与生物学原理,采用四杆机构作为腿部整体结构,弹簧作为储能装置。腿下压,弹簧蓄能过程中,由直流电机带动齿轮组,进而使绳不断上收,弹簧伸长进行储能;为实现跳跃,在绳下端连一小球穿过底轴小孔,小孔处有挡片控制,准备起跳时,由舵机控制挡片弹开,小球释放绳子弹开,这样会除去跳跃时绳带动轴,齿轮反转的阻力,使弹性势能尽可能完全转化跳跃高度。
