
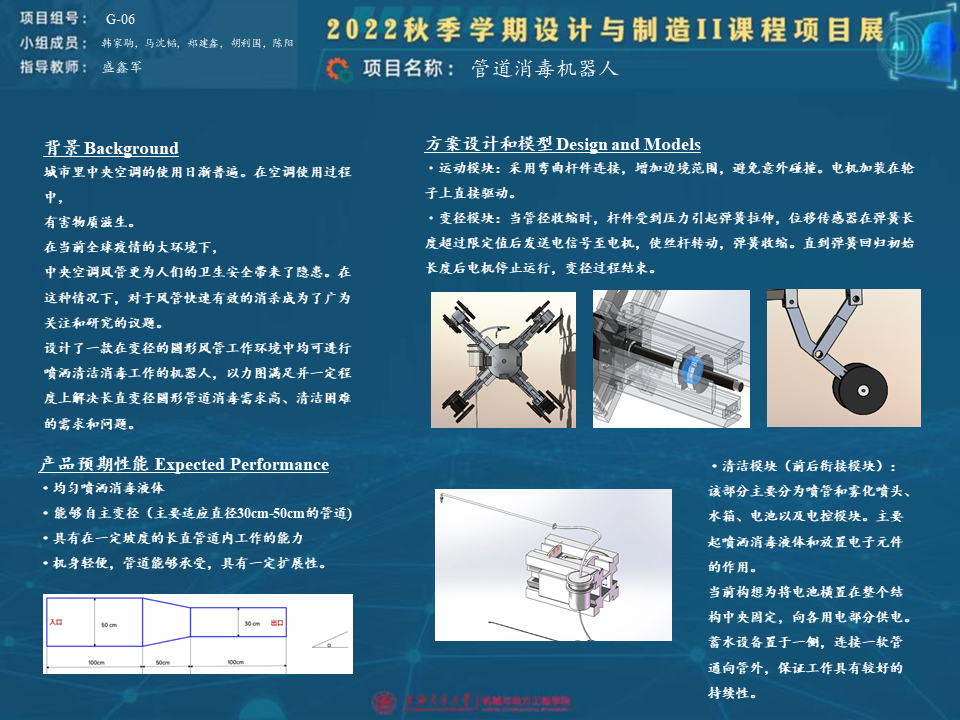
城市里中央空调的使用日渐普遍。在空调使用过程中,室外空气中各类悬浮物不能完全被空调过滤装置所阻隔,造成有害物质滋生。在当前全球疫情的大环境下,四通八达的中央空调风管更为人们的卫生安全带来了隐患。在这种情况下,对于风管快速有效的消杀成为了广为关注和研究的议题。基于这一现状,本项目组利用传感器反馈调节的机理设计了一款在变径的圆形风管工作环境中均可进行喷洒清洁消毒工作的机器人,以力图满足并一定程度上解决长直变径圆形管道消毒需求高、清洁困难的需求和问题。
考虑到长直圆形风管的特点:即为了安装和传输考量会产生管径变化,不利于常用管道清洁机器的作业。而且待消毒区域分布均匀,需要机器能够在管壁上实现消毒液体的均匀喷洒。在参考了部分管道机器人的性能后,我们希望项目实现的机器人具有如下功能:
1. 能够均匀喷洒消毒液体,实现管道清洁功能;
2. 能够主动适应一定粗细范围的缓变径管道,发挥产品在特定环境下的优势;
3. 能在长直管道内实现前进后退等机械功能,期望长直管道内工作相对自主;
4. 可以适应具有一定坡度(最大45°)的管道,以满足复杂情况的工作需求;
5. 机体更轻便,且具有一定的扩展性,可搭载如检测设备、维护设备等多种部件,实现不同功能。
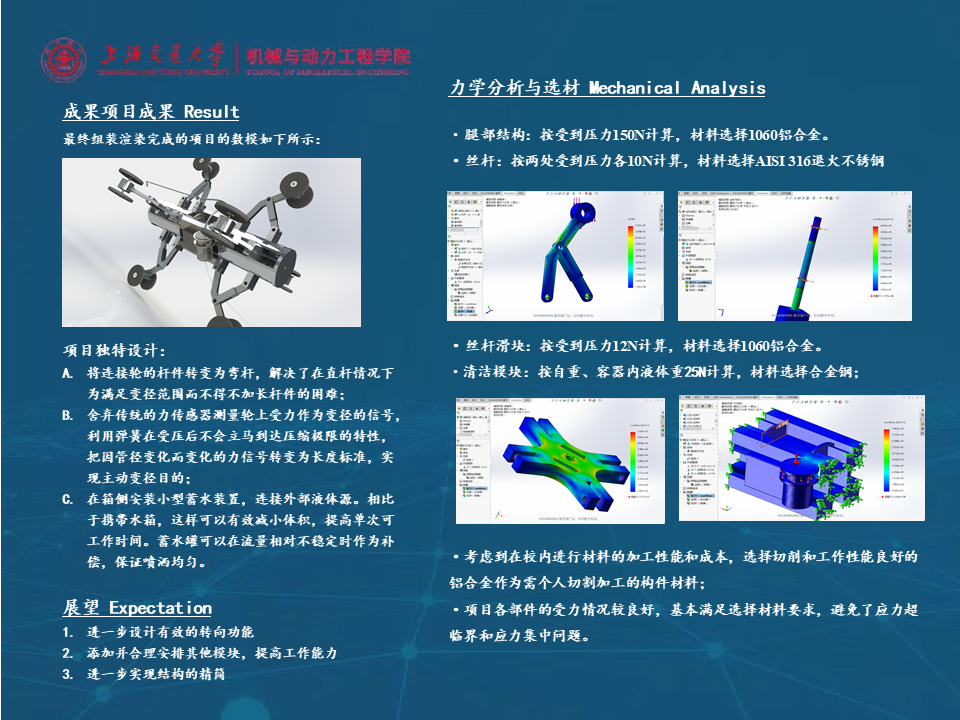
经过本学期的工作,本项目组针对上述目标完成了项目产品的设计,基于力学仿真与机构运动分析成功建立了机器人3D模型,并进行了渲染与运行仿真。
在清洁功能方面,项目机器人自携带一蓄液装置,并接长软管,能够从管道外取液,并通过多个雾化喷嘴装置实现管内均匀喷洒,以达到消毒目的;
在管内运动方面,项目机器人采用多个电机轮进行管内运动。在变径的方面,我们利用弹簧滑块在受压后距被完全压紧存在一定压缩冗余的特性,搭配线距离传感器,将力学信号转化为长度反馈,从而感知管径的缓慢变化。基于这一信息通过步进电机带动与四杆相连的丝杆进行相应运动,实现适应管径变化的设计目的。
