
随着人类的发展,对资源的需求不断增加,陆地上的资源日益紧缺,于是人类把目光投向海洋。海洋中蕴藏着丰富的生物资源和矿产资源。具有海洋勘测、海底探查以及水下侦查和跟踪功能的水下机器人,已成为探索海洋、开发海洋和海洋防卫的重要工具。鱼类种类繁多、形态各异,具有非凡的游动能力。鱼类通过身体运动推动周围的水,以此来获得推进力,对于涡流的精确控制使得鱼类游动推进效率高、机动性好。模仿鱼类的游动推进模式,研制出高效低噪、灵活机动的仿生机器鱼,用以进行水下复杂环境作业,已经成为研究人员追求的目标。本小组以箱鲀为仿生对象,设计了一种可以在水中实现前进、转向、浮沉运动,同时对环境的温度、压强、深度进行检测,通过蓝牙进行远程控制和通信的鱼型水下机器人。
本小组设计的项目预计能够实现以下三个功能。
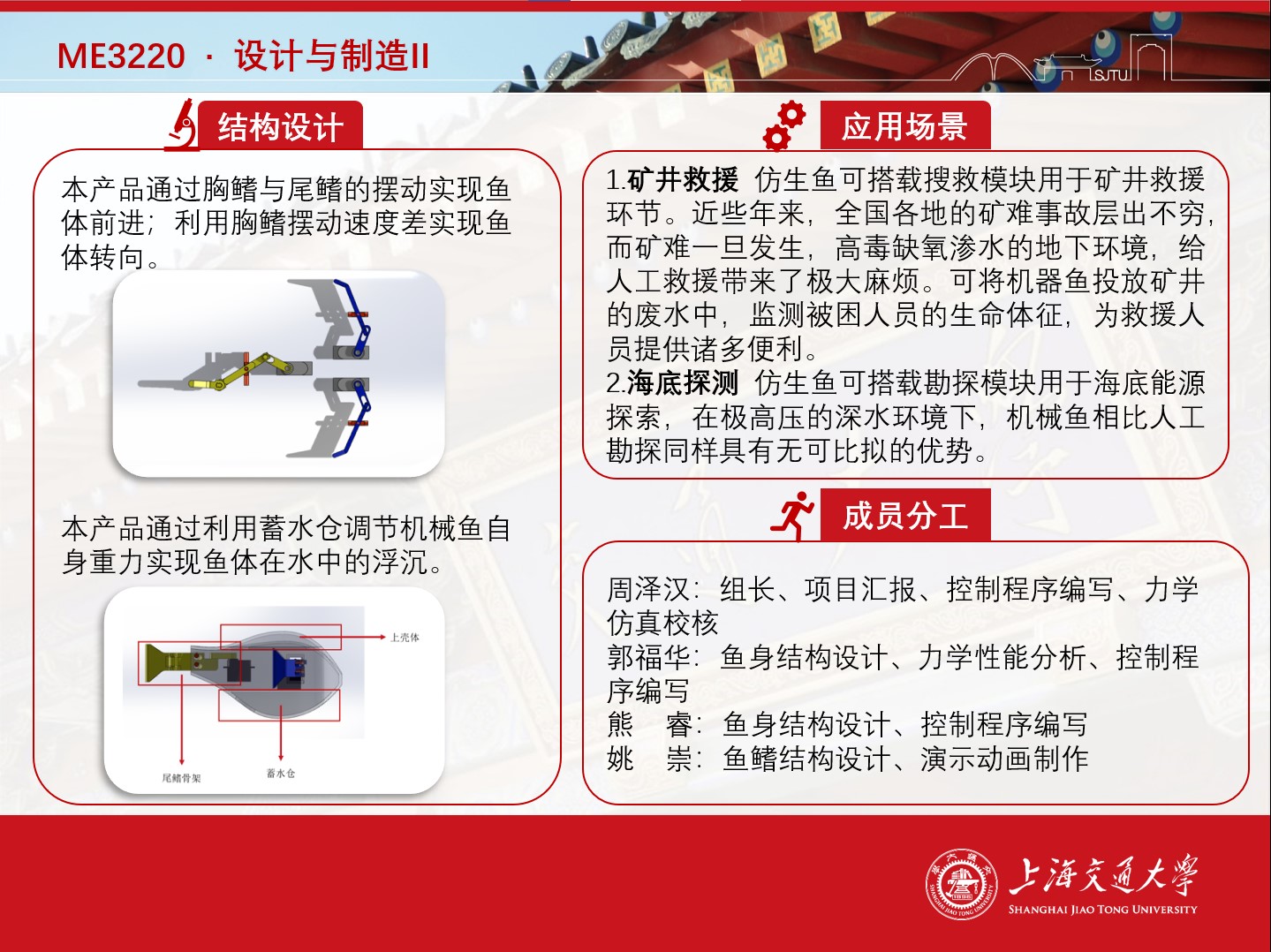
功能1:实现在水中的直线前进与转弯
功能2:实现在水中的悬停上浮下潜
功能3:检测水温水压等水体参数
且希望能在以下场景有所应用:
1.矿井救援 仿生鱼可搭载搜救模块用于矿井救援环节。近些年来,全国各地的矿难事故层出不穷,而矿难一旦发生,高毒缺氧渗水的地下环境,给人工救援带来了极大麻烦。可将机器鱼投放矿井的废水中,监测被困人员的生命体征,为救援人员提供诸多便利。
2.海底探测 仿生鱼可搭载勘探模块用于海底能源探索,在极高压的深水环境下,机械鱼相比人工勘探同样具有无可比拟的优势。
1.实现了通过尾鳍和胸鳍的运动配合进行前进和转向操作。
2.实现了通过储水仓吸排水来进行鱼体下潜和上浮操作。
3.实现了通过手机蓝牙对机器人运动的远程控制和水下信息的采集。
4.作为水下工作平台,可以搭载更多传感器。
