
越障、避障是现代机器人技术中的重要内容,除传统的障碍识别并合理巡线的方法外,跳跃也是有效的避障方式。通过跳跃,机器人可以越过崎岖的地形,跨越高度高于机器人本身几倍的障碍。但由于机器人自身重量等因素,依赖于能量瞬间爆发的跳跃机器人设计起来颇有难度。项目所设计的跳跃机器人从仿生学中寻找灵感,设计了近似于青蛙的发力结构,实现了机器人的跳跃功能。项目机器人主要由双头转轴电机提供动力,在四个关节处分别设置扭簧储能,通过电机的低速正转提供较大扭矩,高速反转驱动机器人跳跃。整个机器人结构简单有效,可以较好地实现设计功能指标。
项目设计目标首先是功能的实现,即在装载两部电机、arduino板等电控元件的情况下可以正常起跳。同时,通过电机有设计的正反转实现连续起跳,即电机慢速正转压缩弹簧,快速反转起跳,在空中通过控制滞空时间更改电机旋转方向压缩弹簧为下一次跳跃做好准备。同时项目计划引入遥控模块控制电机的正、反转,以此即可控制整个跳跃过程并实现有选择的连续跳跃。其次,功能指标主要体现为对跳跃高度的要求。项目设计机器人高度为20厘米左右,重量控制在1kg以内,根据运算,设计实现跳跃高度为机器人高度4-5倍。
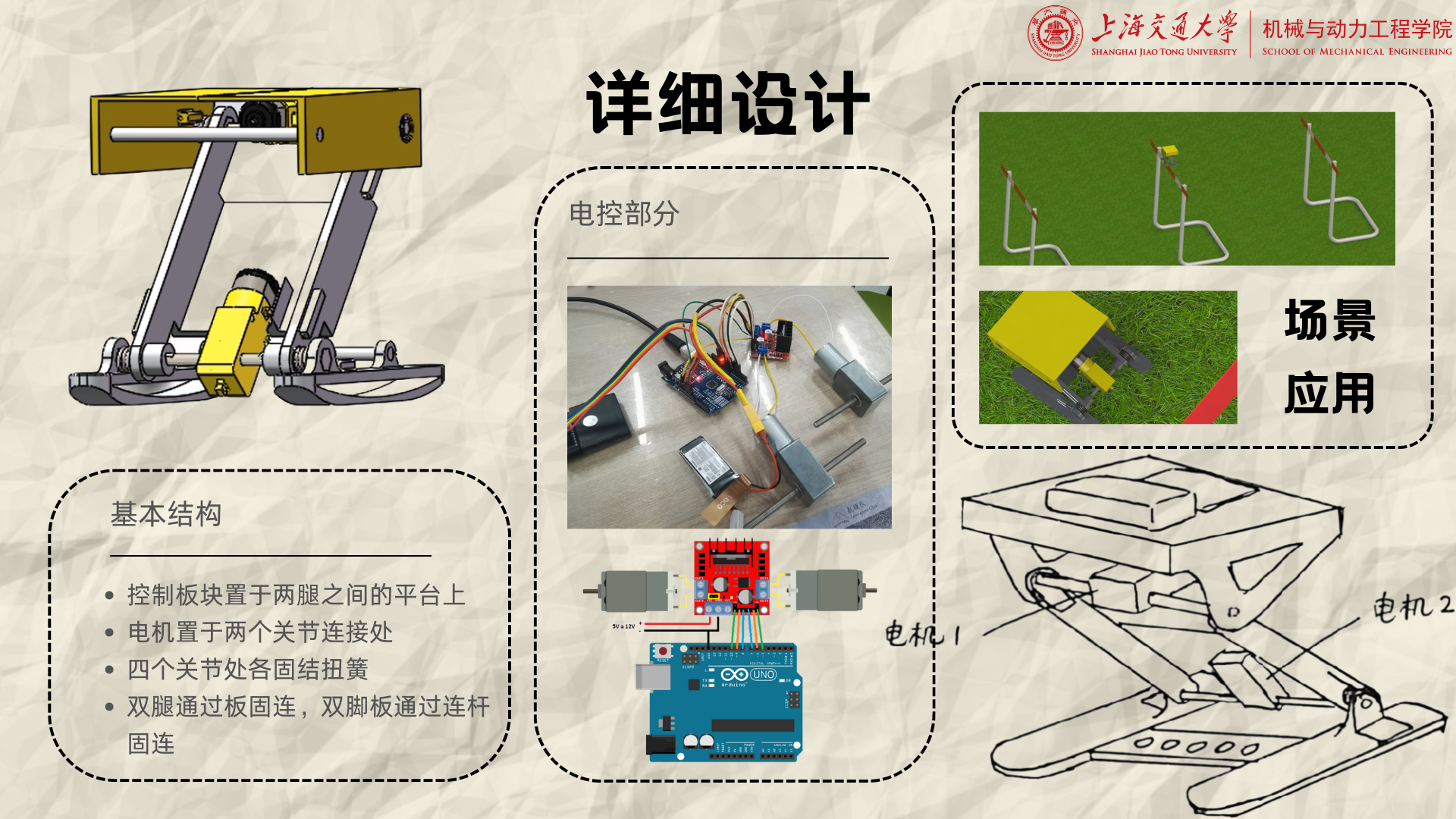
经过努力,项目基本达到预期要求。供能部分,最终选择9V航模电池供电,两个双头转轴电机驱动四个关节,电机扭矩大于5.7kg/cm。关节处选用四个扭簧,扭簧初始角度为90度,可以提供足够的能量。电控部分,使用arduino板控制,编写程序主要包括电机控制部分和遥控部分,电机控制部分即控制电机正反转以及调速,遥控部分则跟PS2手柄蓝牙模块产生联系,实现遥控控制。结构部分,最终机器人为三段式结构,呈Z字型,两电机分别置于上下关节,电机转轴通过六角形螺母分别与腿板、脚板啮合,从而实现驱动。最终,整机重量小于1kg,跳跃高度为1.2m,超额实现设计指标。
