
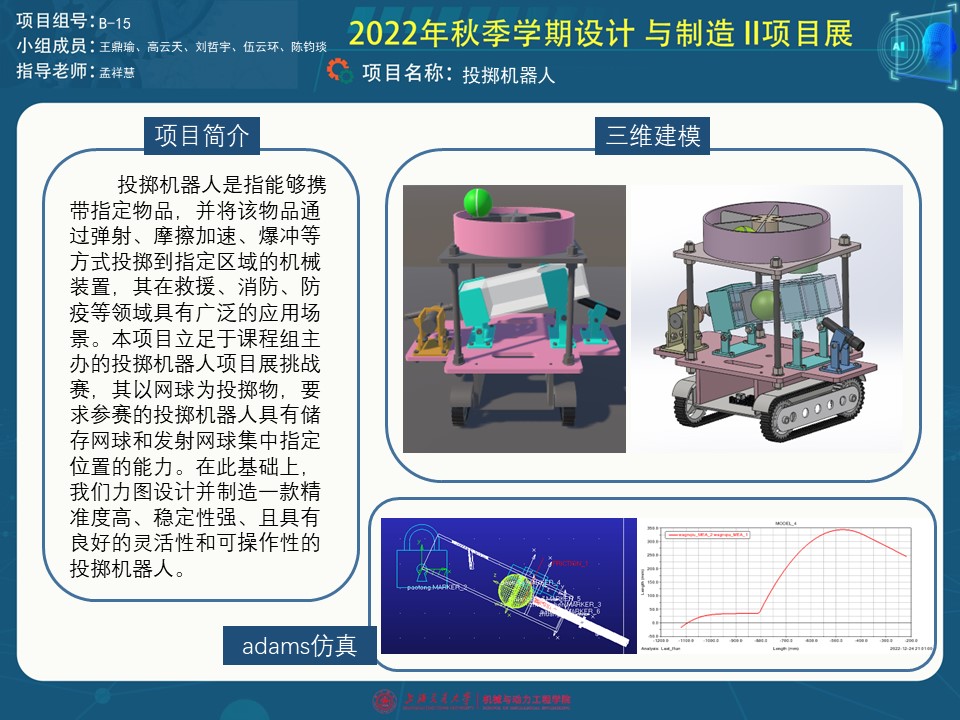
我们设计的投掷机器人主要由运动模块、装弹模块、发射模块、控制模块组成,用以完成机器人的移动、网球的发射与装填。项目的提出立足于课程挑战赛的背景,也考虑了投掷机器人在救援、消防、仿生等方面可能的应用。我们希望设计并制造的投掷机器人具有精准度高、稳定性强的特点,同时具有良好的灵活性和可操作性。
项目的主要目标是实现将网球以足够的精度和稳定程度投掷到特定区域,我们基于此进一步项目目标分解成了将机器人以足够的精度移动至所需投掷位置特定距离的位置,且具有足够精确的朝向、将球以足够的精度和稳定程度投掷一定的距离和快速装填网球的目标。(并基于已有制造条件和计算排除了将球以足够的精度和稳定程度投掷数个设定的距离的方案)这三个目标将分别由运动模块、发射模块、装弹模块实现,且通过控制系统进行控制和协调。
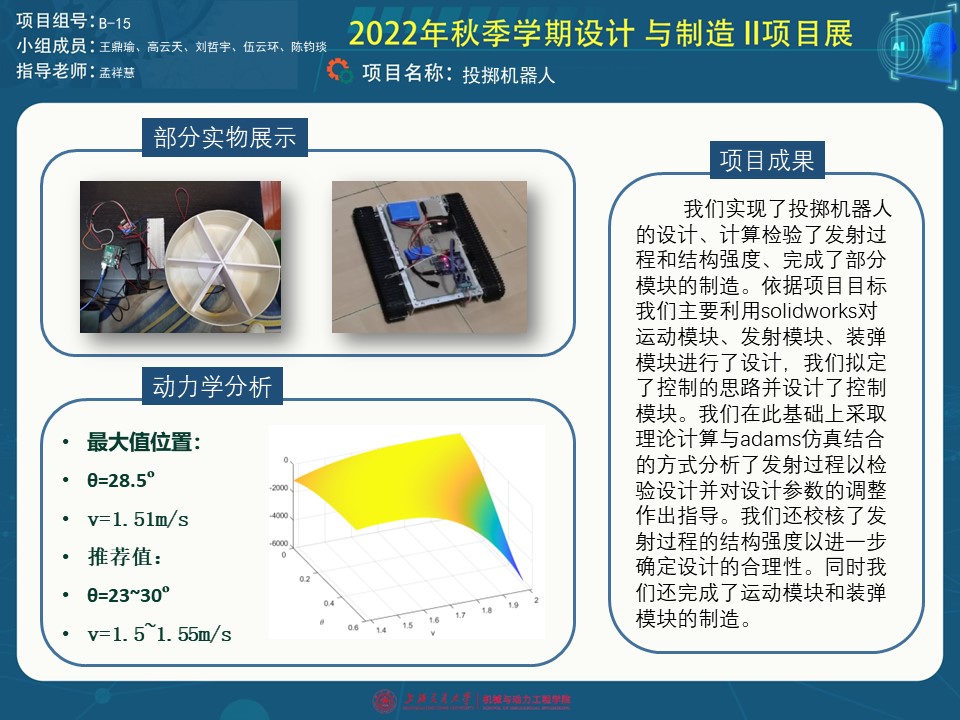
我们实现了投掷机器人的设计、计算检验了发射过程和结构强度、完成了部分模块的制造。依据项目目标我们主要利用solidworks对运动模块、发射模块、装弹模块进行了设计,我们拟定了控制的思路并设计了控制模块。我们在此基础上采取理论计算与adams仿真结合的方式分析了发射过程以检验设计并对设计参数的调整作出指导。我们还校核了发射过程的结构强度以进一步确定设计的合理性。同时我们还完成了运动模块和装弹模块的制造。
