
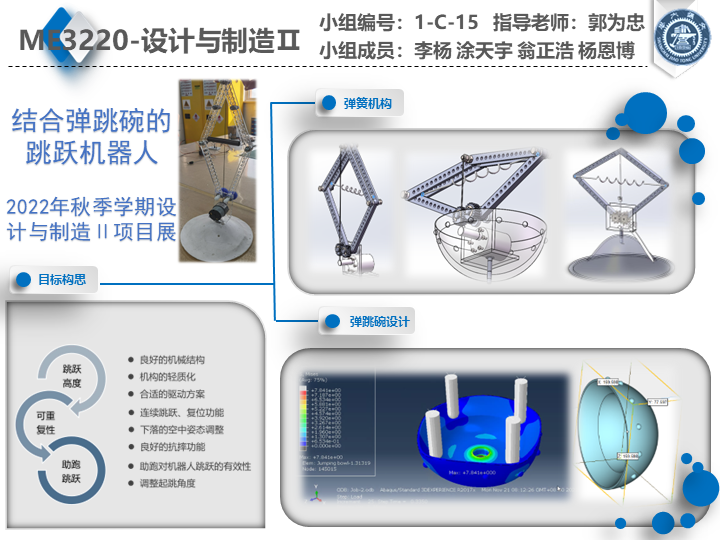
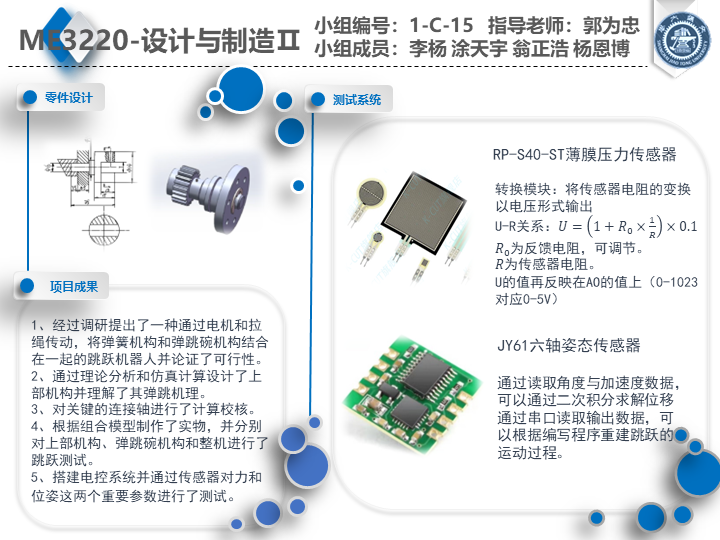
本项目启发于市面上的小型弹跳碗玩具,经过调研提出了一种通过电机和拉绳传动,将弹簧机构和弹跳碗机构结合在一起的跳跃机器人。项目中包含了弹簧机构的计算仿真、弹跳碗设计的计算仿真、零件的校核以及重要零部件的设计,并给出了相应的模型。在最后阶段完成了部分样机的搭建,并利用传感器的测试装置完成了相关力学、运动学量的测定。
1、 理解并把握跳跃机器人的跳跃机理以及设计的关键。
2、 尝试对弹跳碗这类软材料进行一定的建模仿真
3、 以跳跃高度为目标,计算机构的跳跃高度,并优化相关设计参数
4、 提出详细设计方案,并给出三维建模
5、 完成实际样机的搭建,并进行相关测试
6、 编写测试程序,测定跳跃过程中的力学参数以及姿态参数
7、 总结项目制作过程中的成果与不足,为后续改进与日后设计积累经验
