
该项目的主要内容,是制造一种可以在水下接收无线信号、并根据实时指令向设定方向移动、并配备各类传感器和数字显示系统的仿生水母机器人。经过前期的调研和大量理论计算,项目小组设计了以连杆机构为核心、防水直流电机为驱动装置的项目方案,同时完成了QFD图、应力应变仿真、运动仿真、结构爆炸视图等目标。项目组经过车床加工、激光切割、3D打印等加工工艺,进行了长期的加工调整,并利用程序使用户可以通过智能手机的蓝牙功能来远程控制模型机,最后成功制作出了满足设定目标的实物模型机。
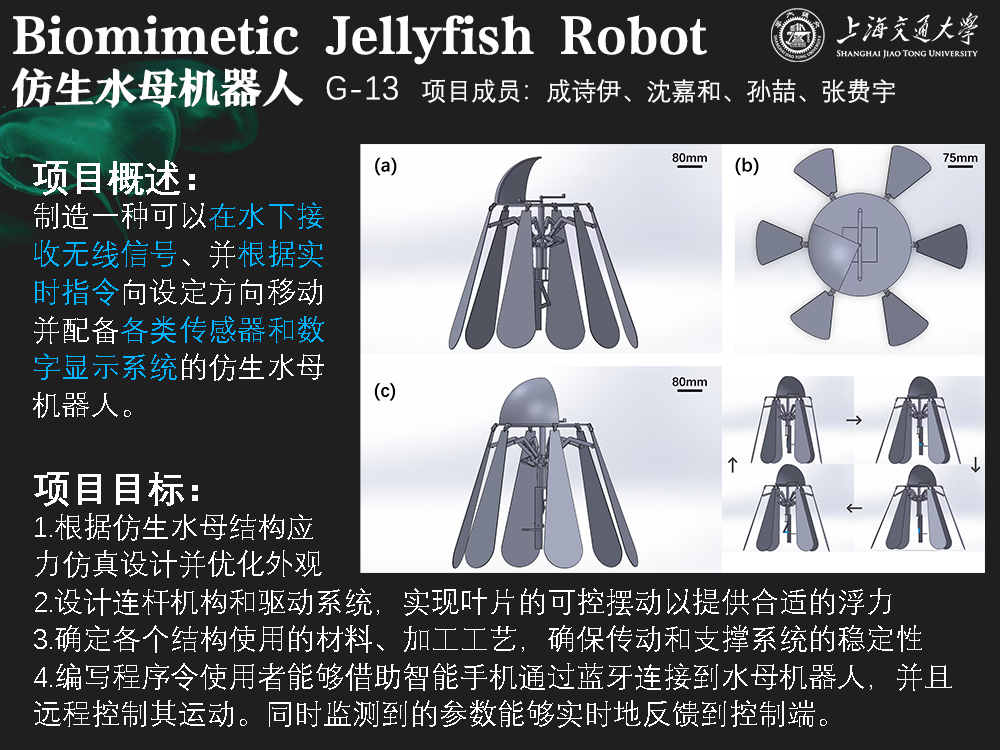
1.根据理论计算建立初步的仿生水母机器人的虚拟模型,然后根据仿生水母结构在不可压缩流体场中的应力仿真模拟,设计出能够在流场中按照设定目标运动的外形结构,并根据后续仿真进行优化;
2.设计一个通过直流电机带动连杆机构实现叶片的上下摆动的机械系统。在水母机器人空心头部已提供一定浮力的条件下,通过改变摆动幅度和速度来提供适合的浮力;
3.利用头部配重实现方向的控制;
4.根据计算和测试,确定各个结构使用的材料、加工工艺、连接方式,确保传动和支撑系统的稳定性和安全性;
5.编写程序,令使用者能够借助智能手机通过蓝牙连接到水母机器人,并且远程无线控制机器人的运动。各类传感器监测到的参数能够实时地反馈到控制端。
1.通过对仿生水母机器人的文献调研、客户调研完成了可行性分析和工程分析;
2.设计并建立了一个以连杆机构为核心的传动结构模型,通过运动模拟、力学仿真完成了尺寸参数分析,并对传动结构进行了进一步优化;
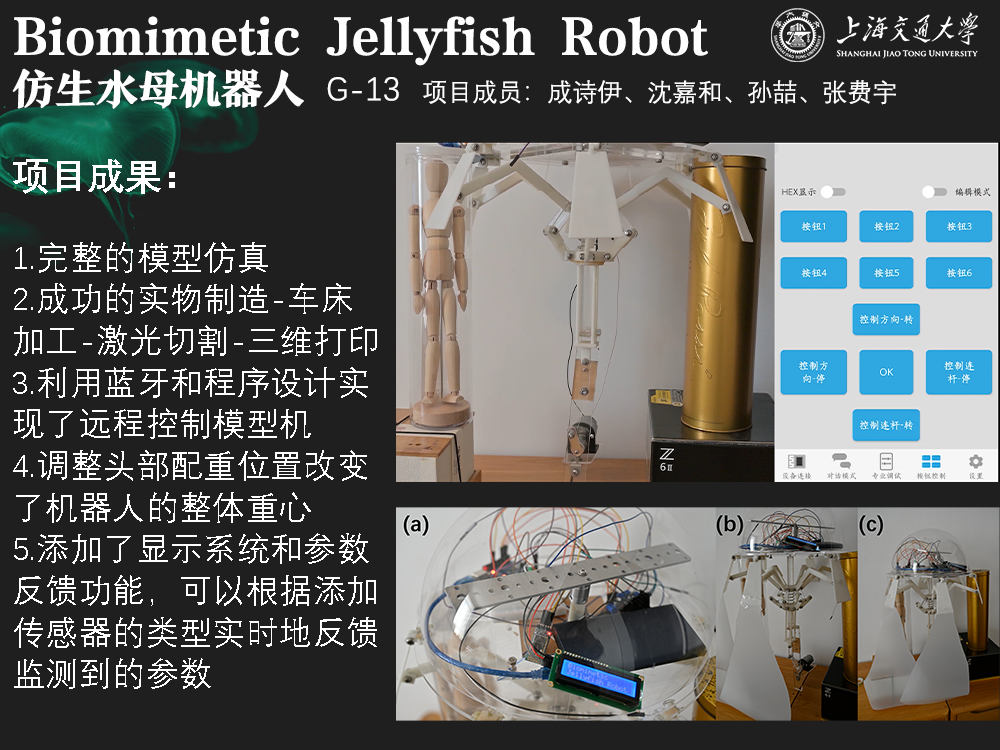
3.完成了所有细节的建模,成功得到了仿生水母机器人的整体三维模型,并考虑到了所有连接部分的设计,完成了整体爆炸视图,便于后续实物制作;
4.成功通过各类加工工艺完成了不同零件和结构的加工和连接,成功制作出了实物的模型机;
5.编写了程序,完成了远程控制模型机的参数反馈、电机驱动等功能。成功实现了大部分预设的项目目标。
