
无论是观赏植物的培养,还是经济作物的种植,种子的播种和发芽都无法保证绝对均匀,而整齐均匀既美观又便于收获,因此幼苗移栽是一个不可避免的过程。现有的移栽机械均为人力驱动,且使用者需要俯身弯腰、一株株对幼苗进行处理,极为费时费力。本项目旨在对现有的移栽幼苗用的机械进行改造并实现其自动化,解决人工移载费时费力、有违人体工学的问题,并在可移动方面做了改进,使产品可以自由移动至工作地点进行工作,达到使人从该项劳动中脱离出来的目的。
我们希望开发一款可以实现自动挖取、自动放置、遥控运动等功能且使用便利的幼苗移栽装置。我们选择以电动系统为主要控制方式,分别实现程序控制移栽装置的挖取功能和遥控整个装置在一个平面上的自由运动。由于在原有手动工具基础上进行改进,我们还希望能够在实现产品功能的基础上,寻求更简单的产品加工手段,以尽可能地提升本产品在维护、维修、升级、生产等方面的简便性和经济性。我们希望通过合理的机械结构,兼顾产品的可靠性、功能的多样性和生产加工的低成本。
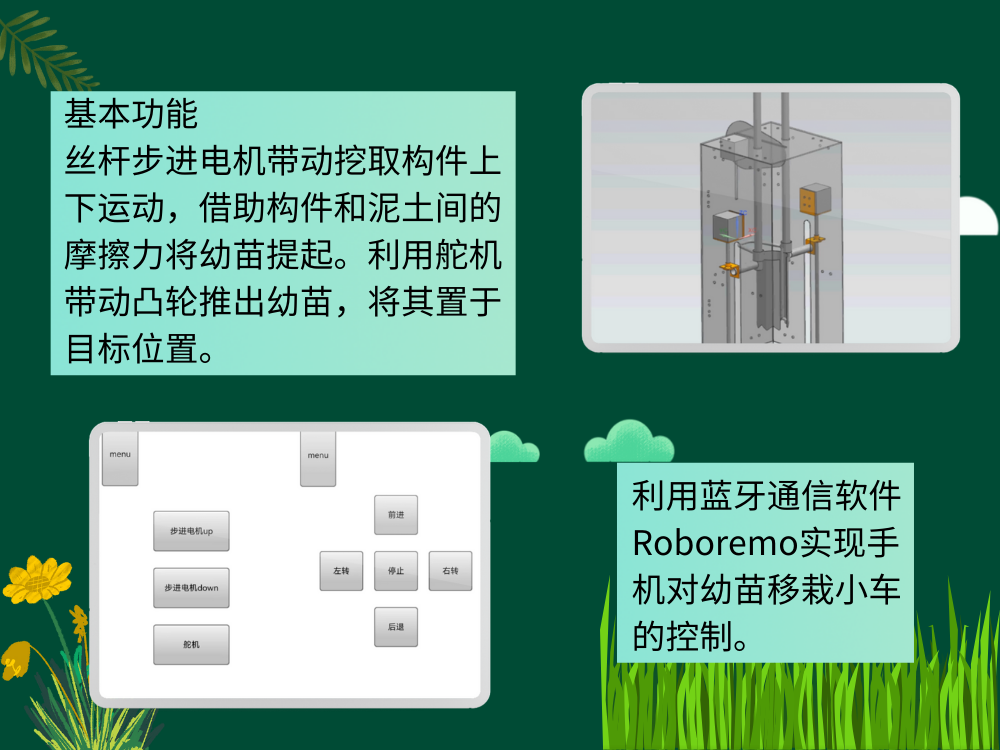
我们在原有手动装置的基础上进行了改进,设计了以arduino电机驱动,利用滚珠丝杠实现挖取机构的上下运动,通过对整体框架的设计对挖取机构进行限位和固定,实现其运动过程中的稳定性,完成了挖取和放置幼苗过程中流程稳定的目标要求。
我们设计了采用凸轮机构利用舵机驱动将挖取的幼苗放置到指定位置的方式,并利用了原有装置本身的特殊结构以实现放置过程中机构的稳定性和可靠性。
我们设计了一个专门的遥控小车作为装置的底座,通过arduino电机驱动以实现幼苗移栽装置整体遥控运动并到达指定位置的功能。
