

本产品是一款借鉴了昆虫蠕动的行进方式,采用蠕动前进的小型无人机器人。它能够适应不同的复杂地形,并配合摄像头、机械臂等部件,从而达到灾区救援、环境探测、物品搜索、管道清理等效果。该机器人既可以通过加装遥控装置实现远程操控,也可以预先设计好行动模式使其自主行动。有效规避了人们实地行动的风险,同时还为许多人们难以到达地方的行动提供了一种新的方式。
第一,该机器人需要拥有较强的地形适应能力,可以攀爬角度不大的斜坡,忽略小型地面杂物带来的粗糙度,能够攀爬高度差不大的台阶型物体。第二,该机器人运动的过程中要保持较高的平稳性。平稳的行进方式既可以有效避免机器人侧翻倾倒导致的无法前进的问题,又可以为与其配合的机械臂、摄像头等部件提供良好的工作环境。第三,该机器人运动所需空间要限制在一定范围内。狭小的运动空间可以保证机器人通过缝隙、管道等对体积要求较高的环境,从而到达更多的地方进行行动。
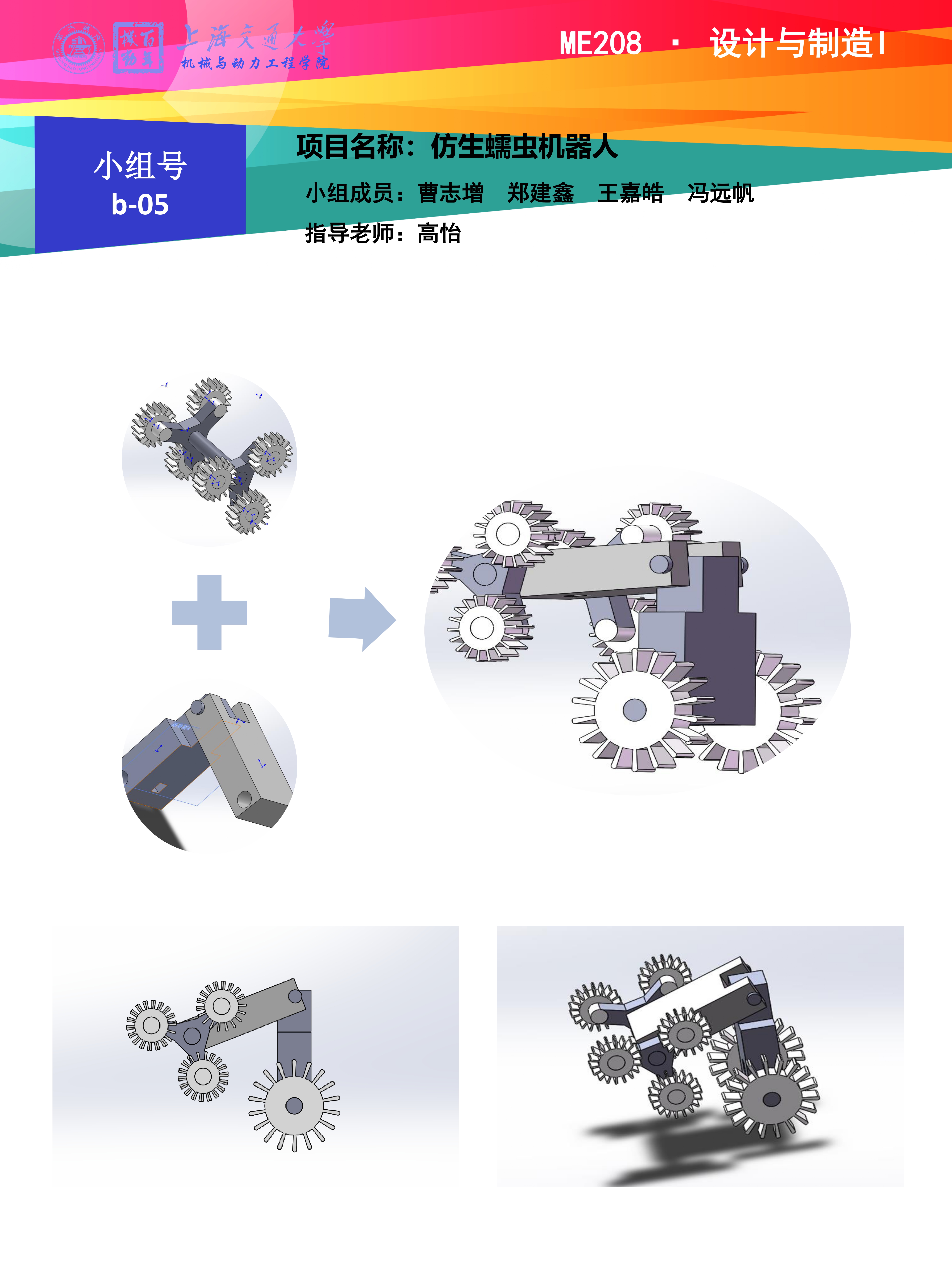
经过不断的调试与修改,我们本阶段的机器人产品已经较好的实现了如下目标:首先我们轮子的形状不是简单的圆形,中间有很多空隙,可以有效避免路面粗糙度的影响。其次轮子的排列设计成了三个小轮子组合和一个大轮子配合的方式。这样既保证了攀爬阶梯的能力,又保证了行进的稳定性。与此同时,我们轮子主体结构之间还加装了弹簧作为缓冲装置,进一步的保证了稳定行进。为了保证材料的强度,弹簧将来可以通过液压杆来替换。
